Paper:
Automation of Intraoperative Tool Changing for Robot-Assisted Laparoscopic Surgery
Dongbo Zhou*, Yura Aoyama*, Hayato Takeyama*, Kotaro Tadano*, and Daisuke Haraguchi**
*Tokyo Institute of Technology
4259 Nagatsuta-cho, Midori-ku, Yokohama, Kanagawa 226-8503, Japan
**National Institute of Technology, Tokyo College
1220-2 Kunugida-machi, Hachioji, Tokyo 193-0997, Japan

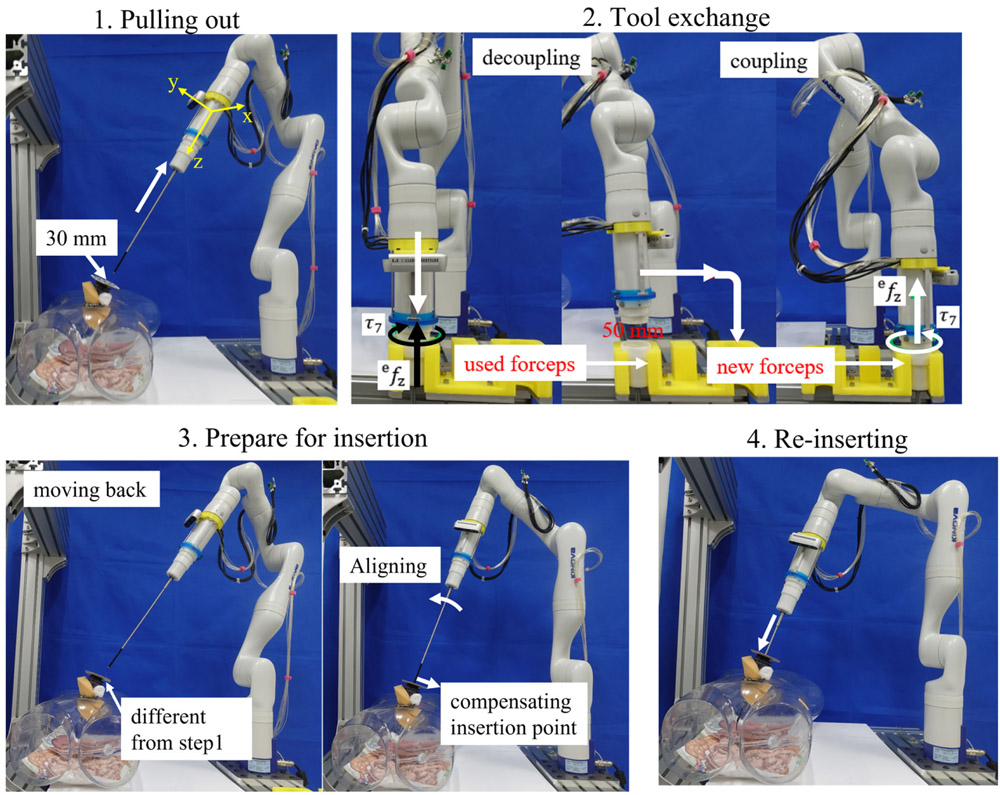
Intraoperative tool change is a time-consuming and labor-intensive task for robot-assisted laparoscopic surgery. Serial multi-DOF manipulators are potential devices for realizing automatic intraoperative tool changes because of the layout flexibility and motion range, and multi-DOF makes it feasible for the manipulator to access and fetch the surgical tools by itself. However, the direction of the trocar may change because of the soft abdomen, and the lack of a fixed RCM makes it difficult for manipulators to reinsert a new surgical tool through the trocar. This study proposes a system prototype using a 7-DOF manipulator to automatically conduct the intraoperative tool-changing task. The newly designed surgical tool docking station facilitates surgical tool coupling/decoupling by rotating the manipulator’s end effector once. The proposed trocar recognition method with position error compensation is reliable for aligning a new surgical tool to the trocar port, even when the direction of the trocar is changed. The experimental results confirms that the manipulator can accomplish an intraoperative tool changing task without additional assistance or correction from the human.
Automated intraoperative tool changing for robot-assisted surgery
- [1] M. Yip and N. Das, “Robot Autonomy for Surgery,” The Encyclopedia of Medical Robotics, Vol.1, pp. 281-313, 2018.
- [2] T. D. Nagy, M. Takacs, I. J. Rudas, and T. Haidegger, “Surgical Subtask Automation – Soft Tissue Retraction,” Proc. Int. Symp. Applied machine Intelligence and Informatics, Kosice, pp. 55-60, 2018.
- [3] T. Osa, N. Sugita, and M. Mitsuishi, “Online Trajectory Planning and Force Control for Automation of Surgical Tasks,” IEEE Trans. Automation Science and Engineering, Vol.15, pp. 675-691, 2018.
- [4] T. Liu and M. C. Cavusoglu, “Needle Grasp and Entry Port Selection for Automatic Execution of Suturing Tasks in Robotic Minimally Invasive Surgery,” IEEE Trans. Automation Science and Engineering, Vol.13, pp. 552-563, 2016.
- [5] C. D’Ettorre, G. Dwyer, X. Du, F. Chadebecq, F. Vasconcelos, E. De Momi, and D. Stoyanov, “Automated pick-up of suturing needles for robotic surgical assistance,” Proc. of ICRA, Brisbane, pp. 1370-1377, 2018.
- [6] X. Ma, C. Z. Song, P. W. Chui, and Z. Li, “Autonomous Flexible Endoscope for Minimally Invasive Surgery with Enhanced Safety,” IEEE Robot. Autom. Lett., Vol.4, pp. 2607-2613, 2019.
- [7] M. R. Treat, S. E. Amory, P. E. Downey, and D. A. Taliaferro, “Initial clinical experience with a partly autonomous robotic surgical instrument server,” Surg. Endosc., Vol.20, pp. 1310-1314, 2006.
- [8] K. Takashima, H. Nakashima, T. Mukai, and S. Hayashi, “Scrub nurse robot for laparoscopic surgery,” Adv. Robot., Vol.22, No.13-14, pp. 1585-1601, 2012.
- [9] I. Murasawa, S. Murofushi, C. Ishii, and H. Kawamura, “Development of a Robotic Laparoscope for Laparoscopic Surgery and its Control,” J. Robot. Mechatron., Vol.29, No.3, pp. 580-590, 2017.
- [10] F. Porpiglia, C. Fiori, R. Bertolo, M. Manfredi, F. Mele, and E. Checcucci, “Five-year outcomes for a prospective randomised controlled trial comparing laparoscopic and robot-assisted radical prostatectomy,” Eur. Urol. Focus, Vol.4, pp. 80-86, 2018.
- [11] A. Melzer, “Endoscopic instruments: conventional and intelligent,” Endosurgery, New York: Churchill Livingstone, pp. 69-95, 1996.
- [12] P. Garcia, J. Rosen, C. Kapoor, M. Noakes, G. Elbert, M. Treat, T. Ganous, M. Hanson, J. Manak, C. Hasser, D. Rohler, and R. Satava, “Trauma Pod: a semi-automated telerobotic surgical system,” Int. J. Med. Robotics Comput. Assist. Surg., Vol.5, pp. 134-146, 2009.
- [13] X. Y. Zeng, Y. H. Chuang, and C. W. Chen, “Automatic Instrument Changer for Robotic Microsurgical Systems,” IFAC-PapersOnLine, Vol.53, No.2, pp. 15910-15915, 2020.
- [14] K. Y. Kim and J. J. Lee, “Design and evaluation of a slave manipulator with roll-pitch-roll wrist and automatic tool loading mechanism in telerobotic surgery,” Int. J. Med. Robot., Vol.8, No.4, pp. 421-435, 2012.
- [15] D. B. Zhou, K. Sanada, and D. Haraguchi, “Robotic Forceps with a Flexible Wrist Joint Made of Super Engineering Plastic,” Sensors and Materials, Vol.32, pp. 1027-1039, 2020.
- [16] G. Toti, M. Garbey, V. Sherman, B. L. Bass, and B. J. Dunkin, “A Smart Trocar for Automatic Tool Recognition in Laparoscopic Surgery,” Surg. Innov., Vol.22, pp. 77-82, 2015.
- [17] R. Bärwinkel, O. Hornung, and K. H. Maier, “Method for Moving an Instrument Arm of a Laparoscopy robot into a Predeterminable Position with Respect to a Trocar,” U.S. Patent 9,066,737 B2, June 30, 2015.
- [18] K. Aizawa, D. Haraguchi, and K. Tadano, “Load Reduction Control on Tool-Insertion Port for Laparoscopic Surgical Robot Using Semi-Active Joints,” J. Robot. Mechatron., Vol.32, No.5, pp. 1000-1009, 2020.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.