Paper:
Proposal and Experimental Verification of an Implicit Control Based Navigation Scheme in Unknown Environment for a Centipede Type Robot
Runze Xiao, Yusuke Tsunoda, and Koichi Osuka
Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan

In the past decades, robot navigation in an unknown environment has attracted extensive interest due to its tremendous application potential. However, most existing schemes rely on complex sensing systems and control systems to perceive and process the geometric and appearance information of the surrounding environment to avoid the collision, while making less use of the mechanical characteristics of the environment. In this research, in order to explore how to make a robot navigate in an unknown environment with minimal active control and minimal sensing by taking full advantage of the mechanical interactions from the environment, which is called implicit control in this study, we propose a centipede robot and its corresponding navigation scheme for navigating a 2D unknown environment without sensing information about the surrounding environment. In this scheme, the only observation input of this system is the goal direction information relative to the robot direction. Based on this scheme, we built a prototype robot and conducted navigation experiments in three environments with different levels of complexity. As a result, we obtained the navigation route map and navigation time distribution of each environment and analyzed the characteristics and applicability scenarios of the proposed navigation scheme compared to the traditional ones.
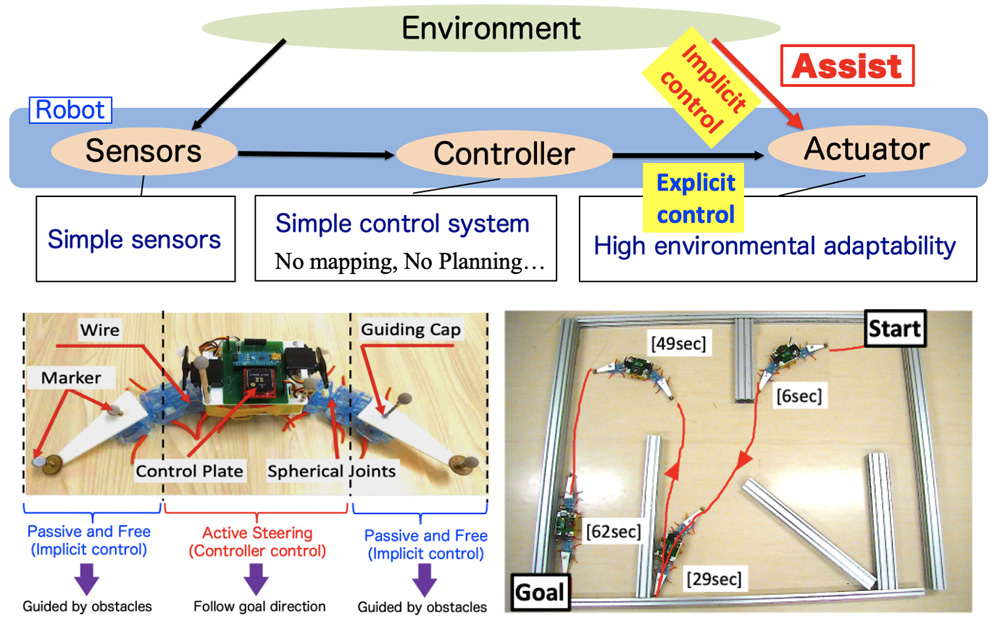
Implicit control based navigation scheme
- [1] H. Durrant-Whyte and T. Bailey, “Simultaneous localization and mapping: Part I,” IEEE Robotics & Automation Magazine, Vol.13, No.2, pp. 99-110, 2006.
- [2] H. Durrant-Whyte and T. Bailey, “Simultaneous localization and mapping (SLAM): Part II,” IEEE Robotics & Automation Magazine, Vol.13, No.3, pp. 108-117 2006.
- [3] T. J. Chong, X. J. Tang, C. H. Leng et al., “Sensor technologies and simultaneous localization and mapping (SLAM),” Procedia Computer Science, Vol.76, pp. 174-179, 2015.
- [4] R. Smith, M. Self, and P. Cheeseman, “Estimating uncertain spatial relationships in robotics,” I. J. Cox and G. T. Wilfong (Eds.), “Autonomous Robot Vehicles,” Springer, pp. 167-193, 1990.
- [5] P. Mirowski, R. Pascanu, F. Viola et al., “Learning to navigate in complex environments,” arXiv:1611.03673, 2016.
- [6] L. Xie, S. Wang, A. Markham et al., “Towards monocular vision based obstacle avoidance through deep reinforcement learning,” arXiv:1706.09829, 2017.
- [7] L. Tai, G. Paolo, and M. Liu, “Virtual-to-real deep reinforcement learning: Continuous control of mobile robots for mapless navigation,” 2017 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 31-36, 2017.
- [8] H. Surmann, C. Jestel, R. Marchel et al., “Deep Reinforcement learning for real autonomous mobile robot navigation in indoor environments,” arXiv:2005.13857, 2020.
- [9] V. Lumelsky and A. Stepanov, “Dynamic path planning for a mobile automaton with limited information on the environment,” IEEE Trans. on Automatic Control, Vol.31, No.11, pp. 1058-1063, 1986.
- [10] T. Kano, R. Yoshizawa, and A. Ishiguro, “Tegotae-based decentralised control scheme for autonomous gait transition of snake-like robots,” Bioinspiration & Biomimetics, Vol.12, No.4, Article No.046009, 2017.
- [11] T. Sato, T. Kano, and A. Ishiguro, “A decentralized control scheme for an effective coordination of phasic and tonic control in a snake-like robot,” Bioinspiration & Biomimetics, Vol.7, No.1, Article No.016005, 2011.
- [12] J. D. Greer, L. H. Blumenschein, A. M. Okamura et al., “Obstacle-aided navigation of a soft growing robot,” 2018 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 4165-4172, 2018.
- [13] J. D. Greer, L. H. Blumenschein, R. Alterovitz et al., “Robust navigation of a soft growing robot by exploiting contact with the environment,” The Int. J. of Robotics Research, Vol.39, No.14, pp. 1724-1738, 2020.
- [14] K. Osuka, A. Ishiguro, X. Zheng et al., “Implicit Control Law Embedded in Control System Solves Problem of Adaptive Function!?,” J. of the Robotic Society of Japan, Vol.28, No.4, pp. 491-502, 2010 (in Japanese).
- [15] R. Pfeifer and J. Bongard, “How the body shapes the way we think: a new view of intelligence,” The MIT Press, 2006.
- [16] K. Osuka, T. Kinugasa, R. Hayashi et al., “Centipede Type Robot i-CentiPot: From Machine to Creatures,” J. Robot. Mechatron., Vol.31, No.5, pp. 723-726, 2019.
- [17] R. Xiao, Y. Tsunoda, and K. Osuka, “A New Robot Navigation Scheme Combining Implicit and Explicit Control to Travel Through the Unknown Environment to Reach the Destination,” 21st SI Division Conf. of the Society of Instrument and Control Engineers (SI2020), 2020.
- [18] R. Xiao, Y. Tsunoda, and K. Osuka, “Stability Analysis of Homing Control of a Mobile Robot,” SICE DAS Symposium, 2021 (in Japanese).
- [19] T. Kinugasa, N. Miyamoto, K. Osuka et al., “Myriapod robot i-CentiPot via passive dynamics – Emergence of various locomotions for foot movement,” 2017 56th Annual Conf. of the Society of Instrument and Control Engineers of Japan (SICE), pp. 7-9, 2017.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.