Paper:
Development of Flexible Electro-Hydraulic Spherical Actuator
Wataru Kobayashi*, Hiroaki Tamaki**, Tetsuya Akagi*, Shujiro Dohta*, and So Shimooka***
*Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama 700-0005, Japan
**SMC Corporation
4-2-2 Kinunodai, Tsukubamirai-shi, Ibaraki 300-2436, Japan
***Okayama University
2-1-1 Tsushima-naka, Kita-ku, Okayama 700-8530, Japan

Voluntary rehabilitation at home helps to prevent the joint contracture after medical treatment. Our previous studies concerned a low-cost portable rehabilitation device using a flexible spherical pneumatic actuator as a passive exercise device. However, the device requires a bulky compressor to drive it. This study results in a compact fluidic driving system that is highly flexible. The system adopts a flexible electro-hydraulic cylinder driven by an electric motor and a hydraulic gear pump. An empirical equation for the suitable pump rotation for the desired displacement of the system has been determined. As a result, the multi-position control of the system within the tracking error of 4 mm has been realized by using the on/off control scheme based on the obtained equation. In addition, a flexible, spherical electro-hydraulic actuator using two proposed drive systems is developed and tested. Control of the attitude of the tested spherical actuator is successfully realized.
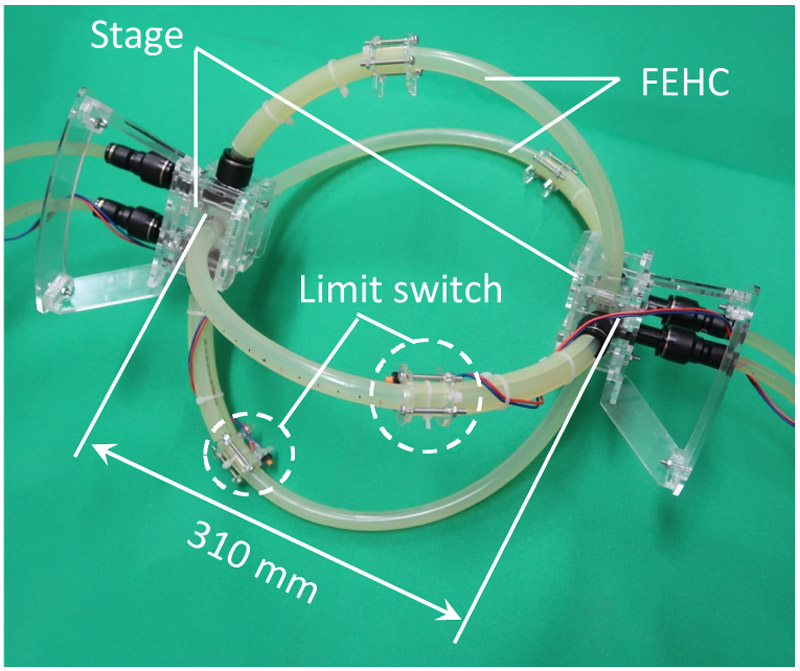
Flexible electro-hydraulic spherical actuator
- [1] M. Ishii, K. Yamamoto, and K. Hyodo, “Stand-Alone Wearable Power Assist Suit – Development and Availability –,” J. Robot. Mechatron., Vol.17, No.5, pp. 575-583, 2005.
- [2] H. I. Krebs, B. T. Voipe, D. Williams, J. Celestino, S. K. Charles, D. Lynch, and N. Hogan, “Robot-Aided Neurorehabilitation: A Robot for Wrist Rehabilitation,” IEEE Trans. on Neural Systems and Rehabilitation Engineering, Vol.15, No.3, pp. 327-335, 2007.
- [3] T. Noritsugu, M. Takaiwa, and D. Sasaki, “Development of Power Assist Wear Using Pneumatic Rubber Artificial Muscles,” J. Robot. Mechatron., Vol.21, No.5, pp. 607-613, 2009.
- [4] H. Kobayashi, T. Shiiba, and Y. Ishida, “Realization of all 7 motions for the upper limb by a muscle suit,” J. Robot. Mechatron., Vol.16, No.5, pp. 504-512, 2004.
- [5] J. Piquion et al., “Robot-assisted gynecological surgery in a community setting,” J. of Robotics and Surgery, Vol.3, No.2, pp. 61-64, 2009.
- [6] M. Takaiwa and T. Noritsugu, “Wrist Rehabilitation Equipment Using Pneumatic Parallel Manipulator,” Proc. of the 2010 World Automation Congress, MON-PM1, 2010.
- [7] M. Takaiwa, T. Noritsugu, N. Ito, and D. Sasaki, “Wrist Rehabilitation Device using Pneumatic Parallel Manipulator Based on EMG Signal,” Int. J. Automation Technol., Vol.5, No.4, pp. 472-477, 2011.
- [8] H. Taniguchi, N. Tsutsui, and Y. Takano, “Feasibility Test of Range of Motion Exercises for Ankle Joints Rehabilitation using Pneumatic Soft Actuators,” Proc. of the 3rd Int. Conf. on Intelligent Technologies and Engineering Systems (ICITES2014), pp. 159-165, 2015.
- [9] Y. Nagata (Ed.), “Soft Actuators – Forefront of Development –,” pp. 291-335, NTS Ltd., 2004 (in Japanese).
- [10] T. Akagi and S. Dohta, “Development of a Rodless Type Flexible Pneumatic Cylinder and its Application,” Trans. of JSME, Series C, Vol.73, No.731, pp. 2108-2114, 2007.
- [11] T. Akagi, S. Dohta, F. Zhao, and T. Fujikawa, “Development and attitude control of flexible robot arm using flexible pneumatic cylinder with simple structure,” Int. J. Automation Technol., Vol.5, No.4, pp. 523-530, 2011.
- [12] M. Aliff, S. Dohta, T. Akagi, and L. Hui, “Development of a Simple-Structured Pneumatic Robot Arm and its Control Using Low-Cost Embedded Controller,” J. of Procedia Engineering, Vol.41, pp. 134-142, 2012.
- [13] T. Morimoto, T. Akagi, and S. Dohta, “Development of flexible haptic robot arm using flexible pneumatic cylinders with backdrivability for bilateral control,” Proc. of the 3rd Int. Conf. on Intelligent Technologies and Engineering Systems (ICITES2014), pp. 231-237, 2016.
- [14] N. Kato, S. Dohta, T. Akagia, T. Morimoto, and Y. Soga, “Development of wearable wrist rehabilitation device using flexible pneumatic cylinders,” Proc. of the 2016 Int. Conf. on Mechanical, Manufacturing, Modeling and Mechatronics (IC4M 2016), 02003, 2016.
- [15] S. Dohta, T. Akagi, C. Lui, and A. Ando, “Development and Control of Flexible Spherical Actuator Using Flexible Pneumatic Cylinders,” Int. J. of Advanced Mechatronic Systems, Vol.5, No.3, pp. 184-192, 2013.
- [16] Y. Matsui, T. Akagi, S. Dohta, W. Kobayashi, and H. Tamaki, “Development of Flexible Spherical Actuator with 3D Coordinate Measuring Device,” J. of Flow Control, Measurement & Visualization, Vol.6, No.2, pp. 95-106, 2018.
- [17] H. Tamaki, S. Dohta, T. Akagi, W. Kobayashi, and Y. Matsui, “Development of flexible electro-hydraulic cylinder for flexible spherical actuator,” Proc. of the 10th JFPS Int. Symp. on Fluid Power 2017, 2A19, 2017.
- [18] W. Kobayashi, J. Guo, T. Akagi, S. Dohta, and N. Kato, “Development of Simplified Wearable Wrist Rehabilitation Device Using Low-Friction Type Flexible Pneumatic Cylinders,” Int. J. of Mechanical Engineering and Robotics Research, Vol.6, No.3, pp. 253-256, 2017.
- [19] F. Zhao, T. Akagi, and S. Dohta, “Development of small-sized quasi-servo valve for flexible bending actuator,” Proc. of the 2009 CACS Int. Automatic Control Conf., pp. 558-562, 2009.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.