Paper:
Prototype of a Continuous Passive Motion Device for the Knee Joint with a Function of Active Exercise
Masaharu Tagami*1, Masaki Hasegawa*2, Wataru Tanahara*3, and Yasutaka Tagawa*4
*1Faculty of Engineering, Kindai University
1 Takaya Umenobe, Higashi-Hiroshima, Hiroshima 739-2116, Japan
*2Faculty of Health and Welfare, Prefectural University of Hiroshima
1-1 Gakuen-cho, Mihara, Hiroshima 723-0053, Japan
*3Graduate School of Systems Engineering, Kindai University
1 Takaya Umenobe, Higashi-Hiroshima, Hiroshima 739-2116, Japan
*4Faculty of Engineering, Tokyo University of Agriculture and Technology
2-24-16 Naka-cho, Koganei, Tokyo 184-8588, Japan

In this study, an active exercise function was added to a continuous passive motion device, which is widely used in rehabilitation therapy for function enhancement. The objective is to reduce physical overwork on the part of physical therapists and promote self-rehabilitation in patients. Impedance control based on position control was applied to provide active exercise load. Various active exercise loads are required to reproduce daily life muscle activity. Accordingly, a friction load model was introduced in the impedance control system. The effects of increasing the types of active exercise loads were evaluated by analysis of muscle activity during experimental tests, and a new muscle activity that could not be attained by the conventional spring-mass-damper load model was confirmed.
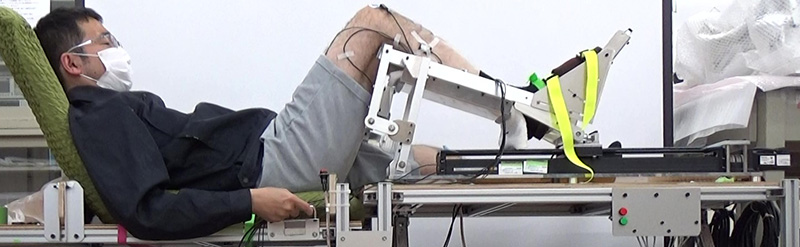
CPM device with a muscle training function
- [1] R. B. Salter, H. W. Hamilton et al., “Clinical application of basic research on continuous passive motion for disorders and injuries of synovial joints: A preliminary report of a feasibility study,” J. of Orthopaedic Research, Vol.1, No.3, pp. 325-342, 1984.
- [2] Q. Liu, J. Zuo et al., “Design and control of soft rehabilitation robots actuated by pneumatic muscles: State of the art,” Future Generation Computer Systems, Vol.113, pp. 620-634, 2020.
- [3] F. Wada, “Current status of robot-aided nuero-rehabilitation,” J. of the Japan Society of Mechanical Engineers, Vol.119, No.1166, pp. 8-13, 2016 (in Japanese).
- [4] S. Hirano, E. Saitho et al., “Development of rehabilitation robots,” Bulletin of the Japanese Society of Prosthetic and Orthotic Education, Research and Development, Vol.29, No.2, pp. 90-97, 2013 (in Japanese).
- [5] K. Kawamura, “Trends in rehabilitation and medical robots,” J. of the Robotics Society of Japan, Vol.11, No.1, pp. 71-75, 1993.
- [6] T. Hideki and S. Shin, “Ankle joint stretching device using tension rod for self-rehabilitation,” J. Robot. Mechatron., Vol.33, No.4, pp. 843-850, 2021.
- [7] T. Ootani, “Problems and countermeasures of CPM device for knee angle,” J. of the Society of Biomechanisms, Vol.18, No.4, pp. 211-215, 1994 (in Japanese).
- [8] Z. Rajestari, N. Feizi et al., “Kinematic synthesis and optimization of continuous passive motion mechanisms for knee,” Proc. of the 7th Int. Conf. on Modeling, Simulation, and Applied Optimization (ICMSAO), pp. 1-6, 2017.
- [9] Y. Hayashibara, H. Hakogi et al., “Study on a CPM device for rehabilitation with variable stiffness mechanism,” Proc. of JSME Annual Conf. on Robotics and Mechatronics (Robomec 2004), 1A1-H-77, 2004 (in Japanese).
- [10] H. Taniguchi, S. Wakimoto et al., “Development of a hand rehabilitation system to prevent contracture for finger joints based on the therapy of occupational therapists (Massage a hand and range of motion exercises using pneumatic soft actuators),” Trans. of the JSME, Vol.80, No.820, TRANS0348, 2014 (in Japanese).
- [11] P. K. Jamwal, S. Hussain et al., “Impedance control of an intrinsically compliant parallel ankle rehabilitation robot,” IEEE Trans. on Industrial Electronics, Vol.63, No.6, pp. 3638-3647, 2016.
- [12] K. Osman, A. M. Faudzi et al., “Intelligent pneumatic assisted therapy on ankle rehabilitation,” Proc. of 2015 IEEE Int. Conf. on Rehabilitation Robotics (ICORR), pp. 107-112, 2015.
- [13] M. Nobutomo, M. Shota et al., “Impedance control of CPM device with flex-/extension an pro-/supination of upper limbs,” Proc. of 2007 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics, pp. 1-6, 2007.
- [14] Y. Okajima, S. Uchida et al., “Therapeutic exercise machine for the lower extremity – mechanical controls that realize soft stretching motion –,” Japanese J. of Medical Electronics and Biological Engineering, Vol.37, No.3, pp. 293-300, 1999 (in Japanese).
- [15] T. Sakaki, S. Okada et al., “TEM: Therapeutic exercise machine for hip and knee joints of spastic patients,” Proc. of the 6th Int. Conf. on Rehabilitation Robotics, pp. 183-186, 1999.
- [16] M. Shotaro, T. Tomoya et al., “Design and experimental verification of a pantograph-based mechanism for lower limb load reduction by compensating for upper body weight,” J. Robot. Mechatron., Vol.30, No.1, pp. 33-42, 2018.
- [17] A. Golgouneh, A. Bamshad et al., “Design of a new, light and portable mechanism for knee CPM machine with a user-friendly interface,” Proc. of 2016 Artificial Intelligence and Robotics (IRANOPEN), pp. 103-108, 2016.
- [18] M. K. Saputra and A. A. Iskandar, “Development of automatic Continuous Passive Motion therapeutic system,” Proc. of the 2nd Int. Conf. on Instrumentation, Communications, Information Technology, and Biomedical Engineering, pp. 376-379, 2011.
- [19] S. Umchid and P. Taraphongphan, “Design and development of a smart continuous passive motion device for knee rehabilitation,” Proc. of the 9th Biomedical Engineering Int. Conf. (BMEiCON), pp. 1-5, 2016.
- [20] A. Wilkening, D. Baiden et al., “Assistive control of motion therapy devices based on pneumatic soft-actuators with rotary elastic chambers,” Proc. of 2011 IEEE Int. Conf. on Rehabilitation Robotics, pp. 1-6, 2011.
- [21] H. Hung-Jung and C. Tien-Chi, “Hybrid CPM/CAM physiotherapy device by use of active feedback control loop,” Proc. of the 1st Int. Conf. on Innovative Computing, Information and Control (ICICIC’06), pp. 146-149, 2006.
- [22] X. Li, H. Xia et al., “Development of legs rehabilitation exercise system driven by pneumatic muscle actuator,” Proc. of the 2nd Int. Conf. on Bioinformatics and Biomedical Engineering, pp. 1309-1311, 2008.
- [23] R. Kurozumi and H. Maeda, “Development of force control unit using linear actuator having two step driving modes for rehabilitation, training and care support,” IEEJ Trans. on Electronics, Information and Systems, Vol.137, No.1, pp. 33-39, 2017.
- [24] K. Shigetoshi, S. Kawamura et al., “Development of a high speed motion training system using a variable mechanical impedance display device: Realization of optimal additional inertia to viscous load,” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.75, No.760, pp. 3230-3236, 2009 (in Japanese).
- [25] N. Hogan, “Impedance Control: An Approach to Manipulation: Part I – Theory,” J. of Dynamic Systems, Measurement, and Control, Vol.107, No.1, pp. 1-7, 1985.
- [26] Y. Tagawa, R. Tagawa et al., “Characteristic transfer function matrix-based linear feedback control system analysis and synthesis,” Int. J. of Control, Vol.82, No.4, pp. 585-602, 2009.
- [27] C. C. D. Wit, H. Olsson et al., “A new model for control of systems with friction,” IEEE Trans. on Automatic Control, Vol.40, No.3, pp. 419-425, 1995.
- [28] T. Shimono, “SEMG Basic Manual,” SAKAI Medical Co., Ltd., 2004 (in Japanese).
- [29] Y. Ono, “Introduction to Biosignal Processing with MATLAB,” Corona Publishing, 2018 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.