Paper:
On the Geometric Featureless Visual Velocity of UGV in an Agriculture Scale
Satoru Sakai and Daiki Nakabayashi
Shinshu University
4-17-1 Wakasato, Nagano 380-0928, Japan

The paper discusses a camera-based velocity estimation for unmanned ground vehicles in an agriculture scale. The proposed concept-based method does not require any geometric feature and focuses on a mapping between the captured images only. The paper provides three pilot experiments. First, we check an assumption of the proposed concept by a field experiment. Second, we check the verification by a set of numerical and laboratory experiments. Third, we check the verification by the field experiment. In the sense that the existence and sensitivity of a representation of the mapping are verified experimentally, the feasibility of the proposed concept is confirmed.
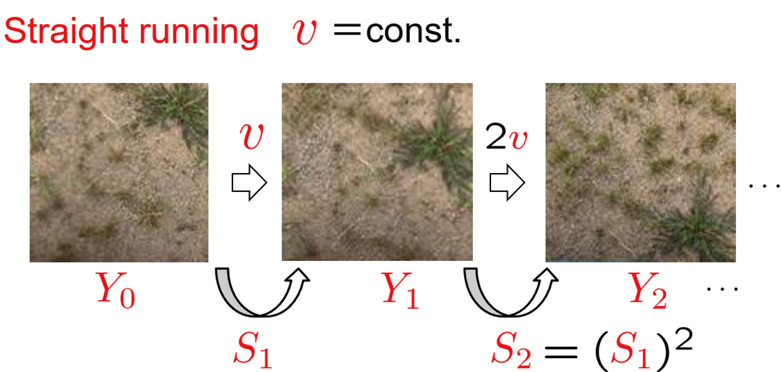
Image examples with acceleration (v→2v)
- [1] X. Song, L. D. Seneviratne, and K. Althoefer, “A Kalman Filter-Integrated Optical Flow Method for Velocity Sensing of Mobile Robots,” IEEE/ASME Trans. on Mechatronics, Vol.16, No.3, pp. 551-563, 2011.
- [2] X. Haiying and L. Zaiming, “A Velocity Measuring System for Vehicle with Camera,” Proc. of 6th Int. Conf. on ITS Telecommunications, pp. 1204-1207, 2006.
- [3] Y. Okafuji, T. Fukao, Y. Yokokoji, and H. Inou, “Design of a Preview Driver Model Based on Optical Flow,” IEEE Trans. on Intelligent Vehicle, Vol.1, No.3, pp. 266-276, 2016.
- [4] Y. Okafuji, T. Fukao, and H. Inou, “Development of Automatic Steering System by Modeling Human Behavior Based on Optical Flow,” J. Robot. Mechatron., Vol.27, No.2, pp. 136-145, 2015.
- [5] N. Noguchi, “Agricultural Vehicle Robot,” J. Robot. Mechatron., Vol.30, No.2, pp. 165-172, 2018.
- [6] Kubota Research and Development, “Kubota technical report,” Kubota Press, No.51, January 2018.
- [7] S. Sakai, K. Osuka, T. Maekawa, and M. Umeda, “Robust Control Systems of a Heavy Material Handling Agricultural Robot: A Case Study for Initial Cost Problem,” IEEE Trans. on Control Systems Technology, Vol.15, No.6, pp. 1038-1048, 2007.
- [8] K. Imou, T. Okamoto, Y. Kaizu, and H. Yoshii, “Ultrasonic Doppler Speed Sensor for Autonomous Vehicles,” J. of Japanese Society of Agricultural Machinery, Vol.63, No.2, pp. 39-46, 2001.
- [9] S. Sakai, M. Iida, K. Osuka, and M. Umeda, “Design and Control of a Heavy Material Handling Manipulator for Agricultural Robots,” Autonomous Robots, Vol.25, No.3, pp. 189-204, 2008.
- [10] Y. Huang and Q. Zhang, “Agricultural Cybernetics,” Springer, 2021.
- [11] K. Deguchi and T. Noguchi, “Visual servoing using eigenspace method and dynamic calculation of interaction matrices,” Proc. of IEEE ICPR, pp. 302-306, 1996.
- [12] S. K. Nayar, S. A. Nene, and H. Murase, “Subspace methods for robot vision,” IEEE Trans. on Robotics and Automation, Vol.12, No.5, pp. 750-758, 1996.
- [13] A. Censi and R. M. Murray, “A bio-plausible design for visual attitude stabilization,” IEEE CDC, pp. 3513-3520, 2009.
- [14] S. Han, A. Censi, A. D. Straw, and R. M. Murray, “A bio-plausible design for visual pose stabilization,” IEEE/RSJ IROS, pp. 5679-5686, 2010.
- [15] J. Zhao, B. Song, N. Xi, L. Sun, H. Chen, and Y. Jia, “Non-vector space approach for nanoscale motion control,” Automatica, Vol.50, No.7, pp. 1835-1842, 2014.
- [16] S. Sakai, M. Ando, and S. Kobashi, “Visual Feedback without Geometric Features against Occlusion: A Walsh basis,” IEEE Trans. on Control Systems Technology, Vol.15, No.2, pp. 864-871, 2019.
- [17] S. Sakai and M. Tsukagoshi, “Camera based velocity estimation for UGV without feature extraction,” Proc. of Int. Symposium of Flexible Automation, pp. 1-3, 2014.
- [18] D. G. Luenverger, “Optimization by Vector Space Method,” Wiley-Interscience, 1960.
- [19] J. L. Walsh, “A closed set of normal orthogonal functions,” Amer. J. Math., Vol.45, No.1, pp. 5-24, 1923.
- [20] K. Zhou, J. C. Doyle, and K. Glover, “Robust and Optimal Control,” Prentice-Hall, 1996.
- [21] G. Strang, “Computational Science and Engineering,” Wiley-Interscience, 2007.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.