Paper:
Training to Improve the Landing of an Uninjured Leg in Crutch Walk Using AR Technology to Present an Obstacle
Naoaki Tsuda*, Takuya Ehiro*, Yoshihiko Nomura**, and Norihiko Kato**
*Department of Intelligent Mechanical Engineering, National Institute of Technology, Wakayama College
77 Noshima, Nada-cho, Gobo, Wakayama 644-0023, Japan
**Department of Mechanical Engineering, Faculty of Engineering, Mie University
1577 Kurimamachiya-cho, Tsu, Mie 514-8507, Japan

A patient who unexpectedly sustains a lower leg injury often uses crutches for walking, to both assist the patient and prevent further injury until a full recovery is made. In this study, a novel crutch walk training system was developed; a head-mounted display (HMD) was introduced to present a virtual obstacle for trainees using crutches. Through repetitions of the training, it was expected that the trainees would improve their overall body stability. Healthy subjects participated in experimental training exercises using the developed training system. As a result, the participants acquired the skill of walking well with crutches without losing their body balance significantly, even in the event of facing a virtual obstacle, during the five training sessions.
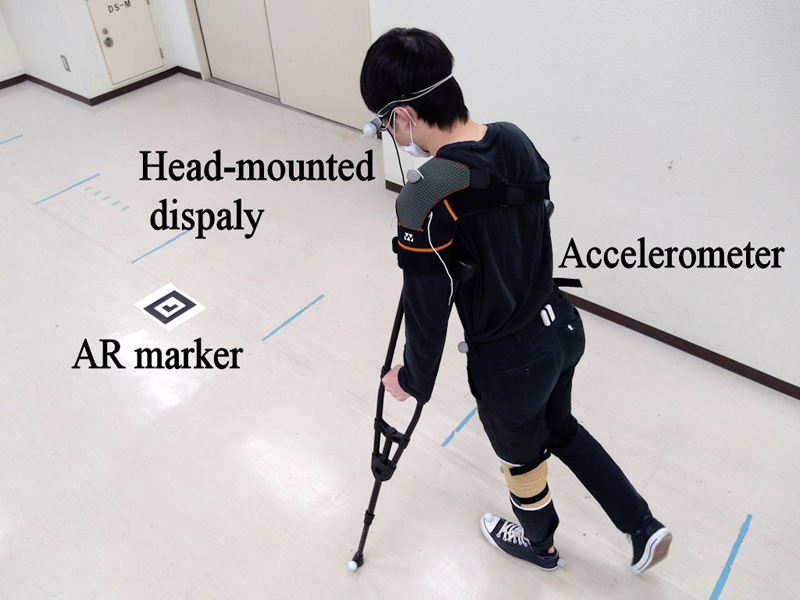
Crutch walk training with HMD
- [1] T. Kikuchi, K. Sakai, and K. Ishiya, “Gait Analysis with Automatic Speed-Controlled Treadmill,” J. Robot. Mechatron., Vol.27, No.5, pp. 528-534, 2015.
- [2] K. Nomura, T. Yonezawa, H. Takemura, and H. Mizoguchi, “Development of Six-DOF Human Ankle Motion Control Device Using Stewart Platform Structure for Fall Prevention,” J. Robot. Mechatron., Vol.28, No.5, pp. 654-663, 2016.
- [3] Q. An, Y. Ishikawa, W. Wen, S. Ishiguro, K. Ohata, H. Yamakawa, Y. Tamura, A. Yamashita, and H. Asama, “Skill Abstraction of Physical Therapists in Hemiplegia Patient Rehabilitation Using a Walking Assist Robot,” Int. J. Automation Technol., Vol.13, No.2, pp. 271-278, 2019.
- [4] Y. Hayakawa, Y. Kimata, and K. Kida, “Study on Human Behavior Classification by Using High-Performance Shoes Equipped with Pneumatic Actuators,” J. Robot. Mechatron., Vol.32, No.5, pp. 947-957, 2020.
- [5] A. Wang, N. Hu, J. Yu, J. Lu, Y. Ge, and Y. Wang, “Human-Like Robust Adaptive PD Based Human Gait Tracking for Exoskeleton Robot,” J. Robot. Mechatron., Vol.33, No.1, pp. 88-96, 2021.
- [6] H. Toda, M. Tada, T. Maruyama, and Y. Kurita, “Optimal Swing Support During Walking Using Wireless Pneumatic Artificial Muscle Driver,” J. Robot. Mechatron., Vol.33, No.2, pp. 379-385, 2021.
- [7] S. R. Faruqui and T. Jaeblon, “Ambulatory assistive devices in orthopaedics: uses and modifications,” J. of the American Academy of Orthopaedic Surgeons, Vol.18, No.1, pp. 41-50, 2010.
- [8] S. M. Bradley and C. R. Hernandez, “Geriatric Assistive Device,” American Family Physician, Vol.84, No.4, pp. 405-411, 2011.
- [9] C. Luz, T. Bush, and X. Shen, “Do Canes or Walkers Make Any Difference? NonUse and Fall Injuries,” The Gerontologist, Vol.57, No.2, pp. 211-218, 2017.
- [10] S. Hignett, G. Sands, and P. Griffiths, “In-patient falls: what can we learn from incident reports?,” Age and Ageing, No.42, pp. 527-531, 2013.
- [11] B. M. Joyce and L. R. Kirby, “Canes, crutches and walkers,” American Family Physician, Vol.43, No.2, pp. 535-542, 1991.
- [12] M. Raaben, H. R. Holtslag, L. P. Leenen, R. Augustine, and T. J. Blokhuis, “Real-time visual biofeedback during weight bearing improves therapy compliance in patients following lower extremity fractures,” Gait and Posture, Vol.59, pp. 206-210, 2018.
- [13] F. Rasouli and B. K. Reed, “Walking assistance using crutches: A state of the art review,” J. of Biomechanics, Vol.98, 109489, 2020.
- [14] N. Tsuda, A. Ito, M. Tounai, and Y. Nomura, “Development of Axillary Crutch Walking Trainer for Three-Point Gait,” Trans. of the Japanese Society for Medical and Biological Engineering, Vol.47, No.2, pp. 209-214, 2009 (in Japanese).
- [15] N. Tsuda, A. Hayashi, M. Tounai, and S. Akutagawa, “Visualization System of Crutch Walking based on Internal Sensors,” Proc. of 2010 IEEE/ASME Int. Conf. on Advanced Intelligent Mechatronics (AIM 2010), pp. 19-24, 2010.
- [16] N. Tsuda, K. Tominaga, S. Tarao, Y. Nomura, and N. Kato, “Development of Training Space with Visual Instruction for Crutch Walk,” Proc. of 2012 ASME-ISPS/JSME-IIP Joint Int. Conf. on Micromechatronics for Information and Precision Equipment (MIPE 2012), pp. 23-25, 2012.
- [17] N. Tsuda, S. Miyamoto, Y. Kado, S. Uemura, Y. Nomura, and N. Kato, “Design of a pendulum-type crutch-walk training device for presenting sensation to be falling,” Artificial Life and Robotics, Vol.26, No.2, 2021.
- [18] H. Yano, T. Masuda, Y. Nakajima, N. Tanaka, S. Tamefusa, H. Saitou, and H. Iwata, “Development of a Gait Rehabilitation System With a Spherical Immersive Projection Display,” J. Robot. Mechatron., Vol.20, No.6, pp. 836-845, 2008.
- [19] M. D. Grabiner, T. J. Koh, T. M. Lundin, and D. W. Jahnigen, “Kinematics of Recovery From a Stumble,” J. of Gerontology, Vol.48, No.3, pp. 97-102, 1993.
- [20] S. Studenski, P. W. Duncan, and J. Chandler, “Postural Responses and Effector Factors in Persons with Unexplained Falls: Results and Methodologic Issues,” J. of the American Geriatrics Society, Vol.39, No.3, pp. 229-234, 1991.
- [21] A. Forner Cordero, H. F.J. M. Koopman, and F. C.T. van der Helm, “Multiple-step strategies to recover from stumbling perturbations,” Gait and Posture, Vol.18, pp. 47-59, 2003.
- [22] C. Shirota, A. M. Simon, and T. A. Kuiken, “Trip recovery strategies following perturbations of variable duration,” J. of Biomechanics, Vol.47, pp. 2679-2684, 2014.
- [23] P. E. Roos, M. P. McGuigan, D. G. Kerwin, and G. Trewartha, “The role of arm movement in early trip recovery in younger and older adults,” Gait and Posture, Vol.27, pp. 352-356, 2008.
- [24] J. Eng, D. Winter, and A. Patla, “Strategies for recovery from a trip in early and late swing during human walking,” Experimental Brain Research, Vol.102, No.2, pp. 339-349, 1994.
- [25] F. Yang, T. Bhatt, and Y.-C. Pai, “Limits of recovery against slip-induced falls while walking,” J. of Biomechanics, Vol.44, pp. 2607-2613, 2011.
- [26] J. M. Stanek, T. A. McLoda, V. J. Csiszer, and J. A. Hansen, “Hip- and Trunk-Muscle Activation Patterns During Perturbed Gait,” J. of sport rehabilitation, Vol.20, No.3, pp. 287-295, 2011.
- [27] R. Ferber, R. L. Osternig, M. H. Woollacott, N. J. Wasielewski, and J.-H. Lee, “Reactive balance adjustments to unexpected perturbations during human walking,” Gait and Posture, Vol.16, pp. 238-248, 2002.
- [28] J. Müller, S. Müller, T. Engel, A. Reschke, H. Baur, and M. Frank, “Stumbling reactions during perturbed walking: Neuromuscular reflex activity and 3-D kinematics of the trunk – A pilot study,” J. of Biomechanics, Vol.49, No.6, pp. 933-938, 2016.
- [29] D. M. Bauer, D. C. Finch, K. P. McGough, C. J. Benson, K. Finstuen, and S. C. Allison, “A comparative analysis of several crutch length estimation techniques,” Physical Therapy, Vol.71, No.4, pp. 294-300, 1991.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.