Paper:
New Method of Path Optimization for Medical Logistics Robots
Hui Jin*,**, Qingsong He*, Miao He*,**, Fangchao Hu*, and Shiqing Lu*,**
*School of Mechanical Engineering, Chongqing University of Technology
No.69 Hongguang Road, Ba’nan, Chongqing 400054, China
**Robot and Intelligent Manufacturing Technology Key Laboratory of Chongqing Education Commission
No.69 Hongguang Road, Ba’nan, Chongqing 400054, China

The path planning problem of logistics robots is mainly subjected to the time cost of the operation of the mathematical model. To save the time of refilling process in the fast medicine dispensing system (FMDS), the optimization procedure is divided into two steps in this study. First, a new mathematical model called the multiple steps traveling salesman problem model (MTSPM) is proposed to optimize the replenishment quantity of each picking and establish picking sets. Second, an improved ant colony optimization (IACO) algorithm is employed, considering the effects of velocity, acceleration, and deceleration in the refilling route during the development of the new model. Simulation results and operational results demonstrated that MTSPM-IACO was better than both the order picking model (OPM) and MTSPM-ACO in terms of saving refilling time. Compared to the OPM, the optimization of the refilling time of MTSPM-IACO was more than 1.73% in simulation and 15.26% in operation. Compared to MTSPM-ACO, the optimization of the refilling time of MTSPM-IACO was more than 0.13% in simulation and 1.67% in operation.
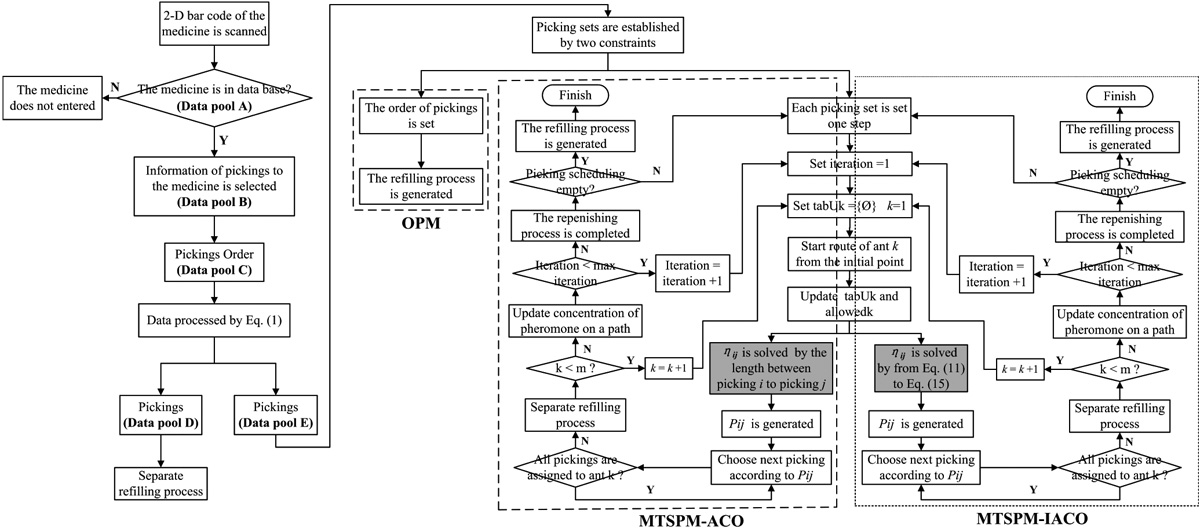
Refiling process of MTSPM-ACO and MTSPM-IACO
- [1] L. Cornuault, V. Mouchel et al., “Identification of variables influencing pharmaceutical interventions to improve medication review efficiency,” Int. J. of Clinical Pharmacy, Vol.40, No.5, pp. 1175-1179, 2018.
- [2] A. S. Kenawy and V. Kett, “The impact of electronic prescription on reducing medication errors in an Egyptian outpatient clinic,” Int. J. of Medical Informatics, Vol.127, pp. 80-87, 2019.
- [3] H.-J. Kang, H. Park, J.-M. Oh, and E. K. Lee, “Perception of reporting medication errors including near-misses among Korean hospital pharmacists,” Medicine, Vol.96, No.39, e7795, 2017.
- [4] H. Chen, C. O. L. Ung, and P. Chi, “Consumers’ Perceptions about Pharmaceutical Care Provided by Community Pharmacists in China in Relation to Over-the-Counter Drugs: A Qualitative Study,” INQUIRY: J. of Health Care Organization, Provision, and Financing, Vol.55, 0046958018793292, 2018.
- [5] T. Iizuka, “Markets with Physician Dispensing,” Encyclopedia of Health Economics, pp. 221-227, 2014.
- [6] D. Li, K. Chen, T. Da, and S. W. Yoon, “Medication planogram design to minimize collation delays and makespan in parallel pharmaceutical automatic dispensing machines,” Int. J. of Advanced Manufacturing Technology, Vol.99, No.9-12, pp. 2171-2180, 2018.
- [7] J. C. Easter, Y. H. Jani, C. M. Kirkpatrick et al., “Unifying a profession and a health care system: Building the case for a “one pharmacy” global community,” Research in Social and Administrative Pharmacy, Vol.16, No.2, pp. 257-260, 2020.
- [8] H. Jin, C. Yun, W. Wang, and D. Li, “Application and research of the Clip Type Manipulator,” Advances in Reconfigurable Mechanisms and Robots II, Mechanisms and Machine Science, Vol.36, pp. 841-851, 2016.
- [9] N. Boysen, D. Füßler, and K Stephan, “See the light: Optimization of put-to-light order picking systems,” Naval Research Logistics, Vol.67, pp. 3-20, 2020.
- [10] Z. M. Lukasik and M. Nowicki, “Knowledge and attitude of Community Pharmacy Employees towards an Automatic Drug Substitution of Generics and Biosimilars,” Acta Poloniae Pharmaceutica, Vol.75, No.5, pp. 1247-1254, 2018.
- [11] F. Zhou, X. Wang, and M. Goh, “Fuzzy extended VIKOR-based mobile robot selection model for hospital pharmacy,” Int. J. of Advanced Robotic Systems, Vol.15, No.4, 1729881418787315, 2018.
- [12] S. Berdot, A. Boussadi, A. Vilfailot et al., “Integration of a Commercial Barcode-Assisted Medication Dispensing System in a Teaching Hospital,” Applied Clinical Informatics, Vol.10, No.4, pp. 615-624, 2019.
- [13] A. N. Khan, A. Ermakov, G. Sukhorukov, and Y. Hao, “Radio frequency controlled wireless drug delivery devices,” Applied Physics Reviews, Vol.6, No.4, 041301, 2019.
- [14] J. Bobers, M. K. Škopić, R. Dinter et al., “Design of an Automated Reagent-Dispensing System for Reaction Screening and Validation with DNA-Tagged Substrates,” ACS Combinatorial Science, Vol.22, No.3, pp. 101-108, 2020.
- [15] H. L. Che, Z. Z. Wu, R. X. Kang, and H. Jin, “A simulation-based Genetic Algorithm approach for refilling process with Clip Type Passive Manipulator,” 15th Int. Conf. on Intelligent Systems Design and Applications, pp. 368-373, 2015.
- [16] M. Fan, C. Yun, and Y. Guo, “A hybrid particle swarm for the distribution routing problem with simultaneous pickups and delivery service,” 2011 Int. Conf. on Transportation, Mechanical, and Electrical Engineering, pp. 379-382, 2011.
- [17] J. H. Xiong, T. L. Wang, and C. Yun, “Optimization of storage location of automated pharmacy based on chaotic particle swarm algorithm,” Information Technology J., Vol.12, pp. 3378-3381, 2013.
- [18] J. H. Xiong, C. Yun, and T. L. Wang, “Storage planning of automated pharmacy based on an improved adaptive chaotic particle swarm optimization algorithm,” J. of Chemical and Pharmaceutical Research, Vol.6, pp. 543-549, 2014.
- [19] H. Jin, C. Yun, and X. S. Gao, “Application and research of the refilling process with Clip Type Manipulator,” 2015 IEEE Int. Conf. on Robotics and Biomimetics, pp. 775-780, 2015.
- [20] J. C. Wu, B. K. Chen, and K. Zhang, “Ant pheromone route guidance strategy in intelligent transportation systems,” Physica A: Statistical Mechanics and its Applications, Vol.503, pp. 591-603, 2018.
- [21] A. Mowshowitz, A. Tominaga, and E. Hayashi, “Robot Navigation in Forest Management,” J. Robot. Mechatron., Vol.30, No.2, pp. 223-230, 2018.
- [22] M. Furukawa, M. Watanabe, and Y. Matsumura, “Local Clustering Organization (LCO) Solving a Large-Scale TSP,” J. Robot. Mechatron., Vol.17, No.5, pp. 560-567, 2005.
- [23] F. Dahan, K. E. Hindi, H. Mathkour, and H. AlSalman, “Dynamic Flying Ant Colony Optimization (DFACO) for Solving the Traveling Salesman Problem,” Sensors, Vol.19, No.8, 1837, 2019.
- [24] H. Yang, J. Qi, Y. C. Miao et al., “A New Robot Navigation Algorithm Based on a Double-Layer Ant Algorithm and Trajectory Optimization,” IEEE Trans. on Industrial Electronics, Vol.66, No.11, pp. 8557-8566, 2019.
- [25] J. Chen, P. F. Gui, T. Ding et al., “Optimization of Transportation Routing Problem for Fresh Food by Improved Ant Colony Algorithm Based on Tabu Search,” Sustainability, Vol.11, No.23, 6584, 2019.
- [26] P. Stodola, “Hybrid ant colony optimization algorithm applied to the multi-depot vehicle routing problem,” Natural Computing, Vol.19, No.2, pp. 463-475, 2020.
- [27] H. Jin, W. Wang, M. Cai et al., “Ant colony optimization model with characterization-based speed and multi-driver for the refilling system in hospital,” Advances in Mechanical Engineering, Vol.9, No.8, 1687814017713700, 2017.
- [28] Q. Luo, H. Wang, Y. Zheng, and J. He, “Research on path planning of mobile robot based on improved ant colony algorithm,” Neural Computing and Applications, Vol.32, No.6, pp. 1555-1566, 2020.
- [29] L. Wang, X.-H. Xia, J.-H. Gao et al., “Improved Ant Colony-Genetic Algorithm for Information Transmission Path Optimization in Remanufacturing Service System,” Chinese J. of Mechanical Engineering, Vol.31, Article No.107, 2018.
- [30] R. Sagban, K. R. Ku-Mahamud, and M. S. A. Bakar, “Reactive max-min ant system with recursive local search and its application to TSP and QAP,” Intelligent Automation & Soft Computing, Vol.23, No.1, pp. 127-134, 2017.
- [31] E. Jabir, V. V. Panicker, and R. Sridharan, “Design and development of a hybrid ant colony-variable neighbourhood search algorithm for a multi-depot green vehicle routing problem,” Transportation Research Part D: Transport and Environment, Vol.57, pp. 422-457, 2017.
- [32] S. Zhang, X. Li, B. Zhang, and S. Wang, “Multi-objective optimisation in flexible assembly job shop scheduling using a distributed ant colony system,” European J. of Operational Research, Vol.283, No.2, pp. 441-460, 2020.
- [33] J.-P. Arnaout, C. ElKhoury, and G. Karayaz, “Solving the multiple level warehouse layout problem using ant colony optimization,” Operational Research, Vol.20, No.1, pp. 473-490, 2020.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.