Paper:
Development of a Care Robot Based on Needs Survey
Junji Kawata*1, Jiro Morimoto*1, Yoshio Kaji*2, Mineo Higuchi*1, Kajiro Matsumoto*3, Masayuki Booka*4, and Shoichiro Fujisawa*1
*1Faculty of Science and Engineering, Tokushima Bunri University
1314-1 Shido, Sanuki, Kagawa 769-2193, Japan
*2Faculty of Human Life Sciences, Tokushima Bunri University
180 Nishihama, Yamashiro, Tokushima 770-8514, Japan
*3Department of Occupational Therapy, Shikoku Medical College
5-62-1 Hama, Utazu, Ayauta, Kagawa 769-0205, Japan
*4NPO Yuto-no-Tsumugi
1089-5 Nishiyama, Nankoku, Kochi 783-0029, Japan

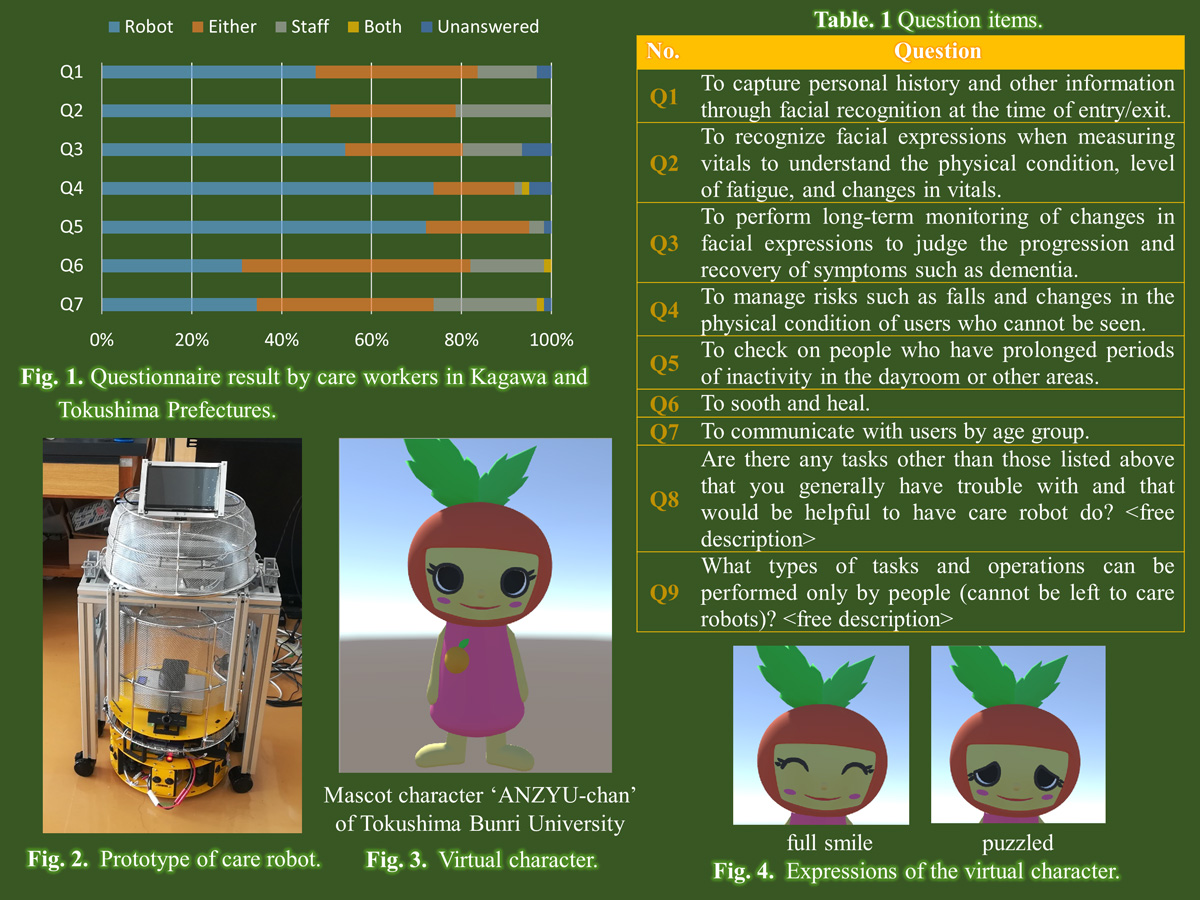
Expectations for care robots are increasing owing to the aging of society with a declining birthrate and shortage of manpower in the care field. However, the use of care robots has not yet become widespread. In this study, we explained the artificial intelligence (AI) technology to care staff and conducted a questionnaire survey to understand their needs. Then, we began to develop a care robot that was required in the care field. In this paper, we report an overview and the current status of the study.
- [1] T. Mukai et al., “Realization and Safety Measures of Patient Transfer by Nursing-Care Assistant Robot RIBA with Tactile Sensors,” J. Robot. Mechatron., Vol.23, No.3, pp. 360-369, 2011.
- [2] M. Nakamura et al., “Development of Transfer Assist Robot Based on the User Needs,” J. Robot. Mechatron., Vol.25, No.6, pp. 992-999, 2013.
- [3] Y. Miyaji and K. Tomiyama, “Implementation Approach of Affective Interaction for Caregiver Support Robot,” J. Robot. Mechatron., Vol.25, No.6, pp. 1060-1069, 2013.
- [4] Y. Mori, R. Ikeura, and M. Ding, “Estimation of Care Receiver’s Position Based on Tactile Information for Transfer Assist Using Dual Arm Robot,” J. Robot. Mechatron., Vol.26, No.6, pp. 743-749, 2014.
- [5] K. Tokoro, T. Hashimoto, and H. Kobayashi, “Development of Robotic Defecation Simulator,” J. Robot. Mechatron., Vol.26, No.3, pp. 377-387, 2014.
- [6] F. Ozaki, “The current status of elderly care robots,” Japanese J. of Geriatrics, Vol.57, No.3, pp. 224-235, 2020 (in Japanese).
- [7] K. Toda et al., “A Home Healthcare System with Communication Robot Technologies – Development of Experimental Systems and in-Home Verification Experiments by Older Persons,” J. Robot. Mechatron., Vol.23, No.6, pp. 951-968, 2011.
- [8] K. Terashima et al., “Medical Round Robot – Terapio –,” J. Robot. Mechatron., Vol.26, No.1, pp. 112-114, 2014.
- [9] R. Matsumura et al., “A Desktop-Sized Communication Robot: “robovie-mR2”,” J. Robot. Mechatron., Vol.28, No.1, pp. 107-108, 2016.
- [10] Y. Ogawa, K. Harada, and H. Kikuchi, “Effects of an agent’s feature grasping on an user’s attachment,” Human-Agent Interaction Symp. 2012, 2D-24, 2012 (in Japanese).
- [11] M. Komori and C. Nagaoka, “Social comparison in subjective evaluation of robot behavior,” J. of Japan Soc. Kansei Eng., Vol.7, No.4, pp. 807-814, 2008 (in Japanese).
- [12] N. Munekata, “An analysis of human attachment to a robot,” J. of the Robotics Society of Japan, Vol.32, No.8, pp. 696-699, 2014 (in Japanese).
- [13] Y. Nakazato, A. Ito, H. Nakajima, K. Takita, and M. Higuchi, “Study on the biped walking pet robot with short legs,” Trans. JSME, Vol.80, No.820, 2014 (in Japanese).
- [14] H. Hashimoto and T. Fujimoto, “A proposal of CHIBICHARA reappearance application,” IPSJ SIG Technical Report, Vol.2013-IS-126, No.2, pp. 1-4, 2013 (in Japanese).
- [15] G. Yu, Y. Hu, and J. Dai, “TopoTag: A Robust and Scalable Topological Fiducial Marker System,” IEEE Trans. on Visualization and Computer Graphics, p. 1, doi: 10.1109/TVCG.2020.2988466, 2019.
- [16] T. Fujimura and H. Umemura, “Development and validation of a facial expression database based on the dimensional and categorical model of emotions,” Cognition and Emotion, Vol.32, No.8, pp. 1663-1670, 2018.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.