Paper:
Stabilization Control of Inverted Two-Wheeled Luggage Transport Vehicle Using a Kalman Filter-Based Disturbance Observer
Hironori Matsubara, Yuki Nagatsu, and Hideki Hashimoto
Faculty of Science and Engineering, Chuo University
1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan

In addition to the declining birthrate and aging population in Japan, there has been a recent decrease in its total population. This threatens to exacerbate a shortage in labor force, which could trigger an increase in the luggage transport costs of transportation companies or the service industry. The demand for inverted two-wheeled luggage transport vehicles has been increasing steadily owing to their high mobility, compactness, affordability, and pivotal turnability. However, owing to their statical instability, these vehicles are limited. Accordingly, stability can be improved in these systems by configuring a spreading system and applying a disturbance observer based on a Kalman filter. The application of a Kalman filter enables us to estimate the disturbance in which the error between the true and estimated values is the least mean square. Furthermore, we validated the efficiency of the proposed method via its translational movement, turning angle control, and load-loading/unloading experiments using various loads.
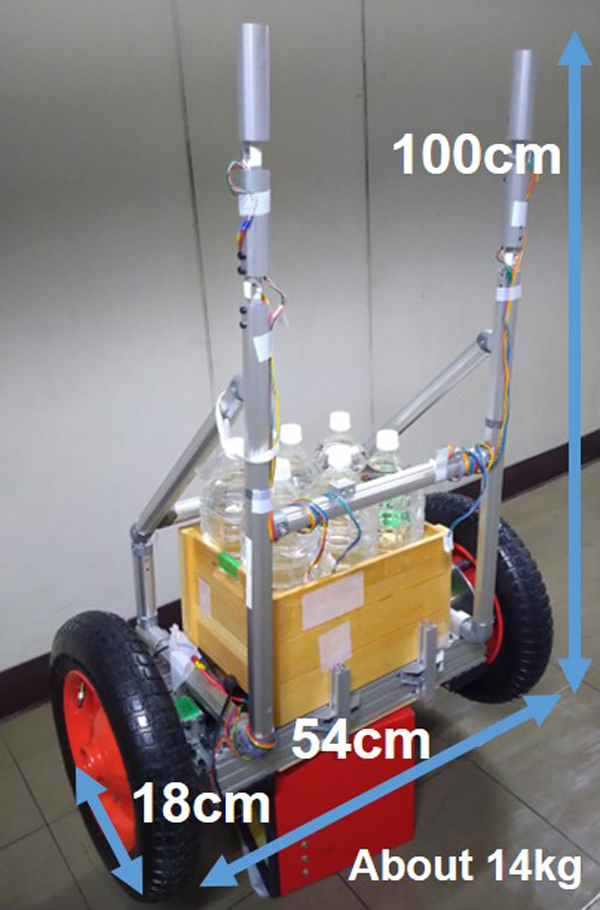
Two-wheeled inverted pendulum robot
- [1] N. Kimura, “Environment recognition for automated guided vehicles in factory and warehouse,” J. of the Robotics Society of Japan, Vol.35, No.9, pp. 652-655, 2017.
- [2] M. Misawa and T. Yoshida, “A smart handcart with autonomous returning function,” J. of the Robotics Society of Japan, Vol.25, No.8, pp. 1199-1206, 2007.
- [3] K. Asakage and O. Watanabe, “167 control of two coaxial wheeled inverted pendulum: Development of a model vehicle for luggage transportation,” The Proc. of Conf. of Tokai Branch, pp. 167-1-167-2, 2011.
- [4] Y. Nagatsu and H. Hashimoto, “Force control for vehicle robot with inverted two-wheeled and stable travelling modes,” Proc. of the 45th Annual Conf. of the IEEE Industrial Electronics Society (IECON 2019), Vol.1, pp. 371-376, 2019.
- [5] H. Matsubara, K. Murakoshi, K. Itou, Y. Nagatsu, and H. Hashimoto, “Realization of an inverted two-wheeled luggage transport vehicle in cooperation with humans,” SICE-SI2019, 2C2-05, 2019.
- [6] Y. Nagatsu, Y. Matsushita, K. Murakoshi, and H. Hashimoto, “Switching control of personal vehicle with two wheels and three wheels modes,” Proc. of the IEEJ Int. Workshop on Sensing, Actuation, Motion Control, and Optimization (SAMCON2019), 2019.
- [7] K. Yamafuji and T. Kawamura, “Postural control of a monoaxial bicycle,” J. of the Robotics Society of Japan, Vol.7, No.4, pp. 74-79, 1989.
- [8] N. Hatakeyama and A. Shimada, “Movement control using zero dynamics of two-wheeled inverted pendulum robot,” Trans. of the Society of Instrument and Control Engineers, Vol.44, No.3, pp. 252-259, 2008.
- [9] Q. Shi, Z. Fang, J. She, J. Imani, and Y. Ohyama. “Motion control of a wheeled inverted pendulum using equivalent-input-disturbance approach,” J. Adv. Comput. Intell. Intell. Inform., Vol.19, No.2, pp. 293-300, 2015.
- [10] K. Terada, H. Miura, M. Okugawa, and Y. Kobayashi, “Adaptive speed control of wheeled mobile robot on uncertain road condition,” J. Robot. Mechatron., Vol.28, No.5, pp. 687-694, 2016.
- [11] T. Matsuno, J. Huang, T. Fukuda, and K. Doi, “Stabilization of an inverted pendulum cart with a balancing mechanism by consistent trajectories in acceleration behavior,” J. Robot. Mechatron., Vol.25, No.1, pp. 262-270, 2013.
- [12] Y. Nagatsu, Y. Matsushita, H. Matsubara, K. Murakoshi, and H. Hashimoto, “A soft landing control for vehicle robot with inverted two-wheeled/stable traveling mode,” J. of the Japan Society for Precision Engineering, Vol.86, No.4, pp. 281-288, 2020.
- [13] Y. Oagu and Y. Noda, “Attitude control of loading platform in consideration of robustness to loading condition in parallel two-wheel transporter,” The Proc. of the Dynamics & Design Conf., 711, 2017.
- [14] T. T. Phuong, K. Ohishi, C. Mitsantisuk, Y. Yokokura, K. Ohnishi, R. Oboe, and A. Sabanovic, “Disturbance observer and Kalman filter based motion control realization,” IEEJ J. of Industry Applications, Vol.7, No.1, pp. 1-14, 2018.
- [15] A. Shimada and C. Yongyai, “Motion control of inverted pendulum robots using a Kalman filter based disturbance observer,” SICE J. of Control, Measurement, and System Integration, Vol.2, No.1, pp. 50-55, 2009.
- [16] T. Kawamura and T. Murakami, “Multifunctional control of a two-wheel driven wheelchair considering comfort of a passenger,” IEEJ Trans. on Industry Applications, Vol.133, No.4, pp. 404-413, 2013.
- [17] Y. Nagatsu, K. Murakoshi, M. Zeinali, and H. Hashimoto, “Robust control of inverted two-wheeled vehicle based on sliding mode control using estimation of equivalent control,” SICE-SI2018, 2D4-16, 2018.
- [18] T. Kiyota, E. Kondo, and T. Sunaga, “Singular lq optimal control for single-input linear digital control systems,” Proc. of 1991 Int. Conf. on Industrial Electronics, Control and Instrumentation (IECON ’91), Vol.3, pp. 2177-2182, 1991.
- [19] Y. Fujisaki and M. Ikeda, “Synthesis of two-degree-of-freedom optimal servosystems,” Trans. of the Society of Instrument and Control Engineers, Vol.27, No.8, pp. 907-914, 1991.
- [20] K. Ohishi, K. Ohnishi, and K. Miyachi, “One approach to the torque-speed regulation of the separately excited dc motor using the state observer,” The Trans. of the Institute of Electrical Engineers of Japan, B, Vol.104, No.6, pp. 373-379, 1984.
- [21] I. Maruta and S. Adachi, “Fundamentals of Kalman Filter (1st Ed.),” Tokyo Denki University Press, 2012.
- [22] T. Ohhira and A. Shimada, “Proposal of high performance methods for linear Kalman filter with disturbance estimation and application to motion control systems,” Trans. of the JSME, Vol.84, No.862, 18-00019, 2018 (in Japanese).
- [23] Z. Zhang and K. T. Chong, “Comparison between first-order hold with zero-order hold in discretization of input-delay nonlinear systems,” Proc. of the 2007 Int. Conf. on Control, Automation and Systems, pp. 2892-2896, 2007.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.