Paper:
Development of a Tetrahedral-Shaped Soft Robot Arm as a Wrist Rehabilitation Device Using Extension Type Flexible Pneumatic Actuators
Wei-Hang Tian*, Cian-Cheng Jhan**, Misaki Inokuma*, Tetsuya Akagi*, Shujiro Dohta*, and So Shimooka***
*Department of Intelligent Mechanical Engineering, Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama 700-0005, Japan
123 University Road, Section 3, Donliou, Yunlin 64002, Taiwan
***Department of Control Engineering, National Institute of Technology, Matsue College
14-4 Nishiikuma-cho, Matsue, Shimane 690-8518, Japan

Based on aging Japanese society, there has been a strong desire for development of rehabilitation devices that patients can use at home. The purpose of this study is to develop a home-based compact, lightweight, flexible, and safe rehabilitation device. In this study, a flexible robot arm for wrist rehabilitation that can be used, while patients hold the top of the robot arm, is proposed and tested. The proposed robot arm consists of three extension type flexible pneumatic actuators (EFPAs) restrained by 22 PET sheets. To achieve suitable bending stiffness of the robot arm, three EFPAs are restrained so as to form a tetrahedral shape. The robot arm can bend toward each radial direction. In this paper, the construction and operational principles of the tested robot arm are described. Additionally, the analytical model of the robot arm for attitude control is also described. In addition, the tracking control using the robot arm for the desired orbit is performed. As a result, the tested robot arm can trace the desired orbit based on the model. It is confirmed that the robot arm has the possibility for application as a wrist rehabilitation device for patients.
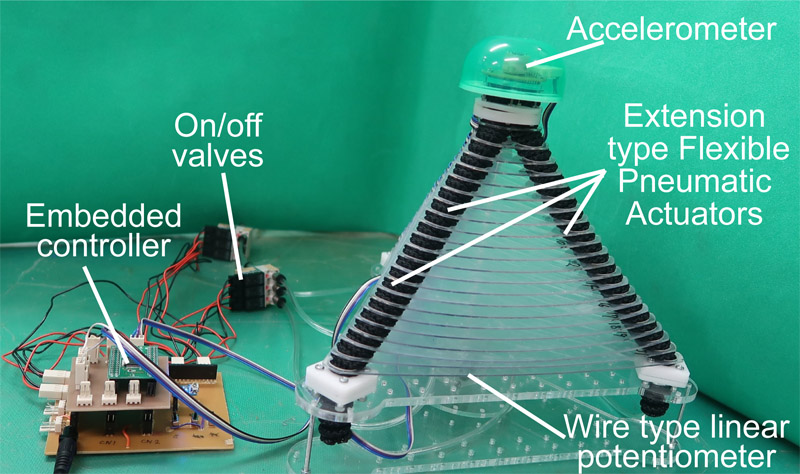
Tetrahedral-shaped soft robot arm using 3 EFPAs
- [1] M. Takaiwa, T. Noritsugu, and D. Sasaki, “Training Simulator for P.T. In Wrist Rehabilitation Using Pneumatic Parallel Manipulator,” Proc. FLUCOME2013, OS4-01-1, pp. 1-8, 2013.
- [2] D. Sasaki, T. Noritsugu, H. Yamamoto, and M. Takaiwa, “Development of Power Assist Glove using Pneumatic Artificial Rubber Muscle,” J. of the Robotics Society of Japan, Vol.24, No.5, pp. 640-646, 2006.
- [3] T. Noritsugu, M. Takaiwa, and D. Sasaki, “Development of Power Assist Wear Using Pneumatic Rubber Artificial Muscles,” J. Robot. Mechatron., Vol.21, No.5, pp. 27-31, 2008.
- [4] H. Kobayashi, T. Shiban, and Y. Ishida, “Realization of all 7 motions for the upper limb by a muscle suit,” J. Robot. Mechatron., Vol.16, No.5, pp. 504-512, 2004.
- [5] Y. Nagata, “Soft Actuators, Forefront of Development,” NTS Ltd., pp. 291-335, 2004.
- [6] Y. Suzuki, T. Akagi, S. Dohta, W. Kobayashi, H. Tamaki, Y. Matsui, and S. Shimooka, “Development of Tetrahedral Type Rehabilitation Device Using Flexible Pneumatic Actuators,” Int. J. of Mechanical Engineering and Robotics Research, Vol.7, No.4, pp. 409-414, 2018.
- [7] S. Shimooka, S. Dohta, T. Akagi, W. Kobayashi, and T. Shinohara, “Improvement of Home Portable Rehabilitation Device for Upper-Limbs,” JFPS Int. J. of Fluid Power System, Vol.12, No.1, pp. 10-18, 2019.
- [8] Y. Matsui, T. Akagi, S. Dohta, W. Kobayashi, and H. Tamaki, “Development of Flexible Spherical Actuator with 3D Coordinate Measuring Device,” J. of Flow Control Measurement & Visualization, Vol.6, No.2, pp. 95-106, 2018.
- [9] F. Zhao, S. Dohta, and T. Akagi, “Development and Analysis of Small-Sized Quasi-Servo Valve for Flexible Bending Actuator,” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.76, No.772, pp. 3665-3671, 2010.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.