Development Report:
System Integration for Component-Based Manzai Robots with Improved Scalability
Tomohiro Umetani*, Satoshi Aoki**, Tatsuya Kitamura*, and Akiyo Nadamoto*
*Department of Intelligence and Informatics, Konan University
8-9-1 Okamoto, Higashinada, Kobe, Hyogo 658-8501, Japan
**Graduate School of Natural Science, Konan University
8-9-1 Okamoto, Higashinada, Kobe, Hyogo 658-8501, Japan

This paper describes system developments for integrating control systems of Manzai robot duos that automatically generate Manzai scripts from Internet articles based on given keywords, as well as improvements in the scalability of the integrated control system. Component-based Manzai robots controlled by RT-Middleware have been developed. However, conventional Manzai robot systems, the control systems of which are individually developed, experience some difficulties in interface integration and system maintenance as well as in scalability. In this study, we built a Manzai robot system excellent in reusability, maintainability and scalability by separating the common part from the hardware-dependent part by using the RT components of RT-Middleware. We also verify the reusability and scalability of the hardware-constrained component groups by implementing the Manzai robot control system into ready-made robots with different types of mechanism. We proved the effectiveness of the developed Manzai robot control system on its implementation results.
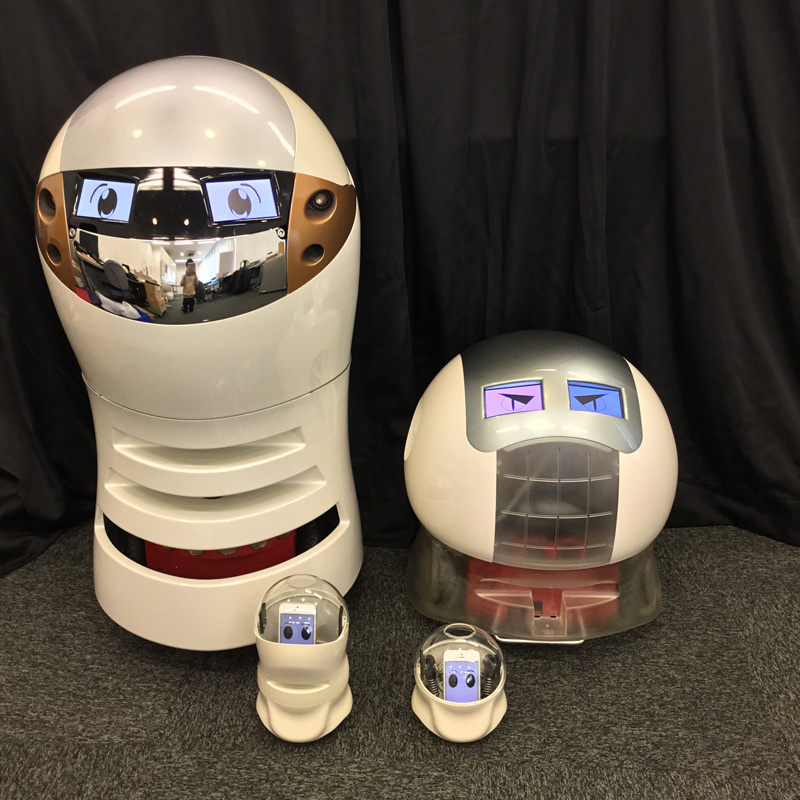
Manzai robot duo controlled by RT-Middleware
- [1] H. Yamamoto, H. Miyazaki, T. Tsuzuki, and Y. Kojima, “A Spoken Dialogue Robot Named Wonder, to Aid Senior Citizens Who Living Alone with Communication,” J. Robot. Mechatron., Vol.14, No.1, pp. 54-59, 2002.
- [2] M. Kanoh, Y. Oida, Y. Nomura, A. Araki, Y. Konagaya, K. Ihara, T. Shimizu, and K. Kimura, “Examination of Practicability of Communication Robot-Assisted Activity Program for Elderly People,” J. Robot. Mechatron., Vol.23, No.1, pp. 3-12, 2011.
- [3] T. Kanda, H. Ishiguro, T. Ono, M. Imai, and R. Nakatsu, “Effects of Observation of Robot-Robot Communication on Human-Robot Communication,” IEICE Trans. on Information Systems (Japanese Edition), Vol.J-85-D-I, No.7, pp. 691-700, 2002 (in Japanese).
- [4] A. Nadamoto and K. Tanaka, “Complementing Your TV-Viewing by Web Content Automatically-Transformed into TV-program-type Content,” Proc. of the 13th Annual ACM Int. Conf. on Multimedia (ACM Multimedia 2005), pp. 41-50, 2005.
- [5] A. Nadamoto, M. Hayashi, and K. Tanaka, “Web2Talkshow: Transforming Web Content into TV-Program-Like Content based on Automatic Transformation of Dialog,” Proc. of the 5th Int. Conf. on Research, Innovation and Vision for the Future (RIVF ’07), pp. 1-6, 2007.
- [6] T. Umetani, R. Mashimo, A. Nadamoto, T. Kitamura, and H. Nakayama, “Manzai Robots: Entertainment Robots based on Auto-created Manzai Scripts from Web News Articles,” J. Robot. Mechatron., Vol.26, No.5, pp. 662-664, 2014.
- [7] K. Hayashi, T. Kanda, T. Miyashita, H. Ishiguro, and N. Hagita, “ROBOT MANZAI: Robot conversation as a passive-social medium,” Int. J. of Humanoid Robotics, Vol.5, No.1, pp. 67-86, 2008.
- [8] Y. Yoshida and M. Hagiwara, “An Automatic Manzai-dialogue Creating System,” Trans. of Japan Society of Kansei Engineering, Vol.11, No.2, pp. 265-272, 2012 (in Japanese).
- [9] T. Takegoshi and M. Hagiwara, “An Automatic Robot Manzai Generation System – A Study on the Effect of Motion in Manzai,” Trans. of Japan Society of Kansei Engineering, Vol.15, No.1, pp. 47-54, 2016 (in Japanese).
- [10] R. Mashimo, T. Umetani, T. Kitamura, and A. Nadamoto, “Generating Funny Dialogue between Robots based on Japanese Traditional Comedy Entertainment,” Proc. of the 2014 Conf. on Interactive Entertainment, pp. 1-7, 2014.
- [11] R. Mashimo, T. Umetani, T. Kitamura, and A. Nadamoto, “Human-Robots Implicit Communication based on Dialogue between Robots using Automatic Generation of Funny Scenarios from Web,” Proc. of 2016 ACM/IEEE Int. Conf. on Human-Robot Interaction (HRI 2016), pp. 327-334, 2016.
- [12] T. Umetani, S. Aoki, K. Akiyama, R. Mashimo, T. Kitamura, and A. Nadamoto, “Scalable Component-Based Manzai Robots as Automated Funny Content Generators,” J. Robot. Mechatron., Vol.28, No.6, pp. 862-869, 2016.
- [13] S. Aoki, T. Umetani, T. Kitamura, and A. Nadamoto, “System Integration for Manzai Robots based on RT-Middleware,” Proc. of 2018 JSME Conf. on Robotics and Mechatronics, 2A1-G09, 2018 (in Japanese).
- [14] N. Ando, T. Suehiro, K. Kitagaki, T. Kotoku, and W. K. Yoon, “RT-Middleware: Distributed Component Middleware for RT (Robot Technology),” Proc. of 2005 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3555-3560, 2005.
- [15] T. Umetani, S. Aoki, K. Akiyama, R. Mashimo, T. Kitamura, and A. Nadamoto, “Manzai Robot System with Scalability based on Distributed Software Components,” Proc. of the 26th 2015 Int. Symp. on Micro-Nano Mechatronics and Human Science, pp. 139-142, 2015.
- [16] T. Umetani, D. Kiyose, H. Sakakibara, S. Aoki, and T. Kitamura, “Component-based Tabletop Robot System Executed on a Self-Contained Micro Controller,” Trans. of the Society of Instrument and Control Engineers, Vol.54, No.1, pp. 126-128, 2018 (in Japanese).
- [17] I. Kitagaki, T. Machino, A. Nakayama, S. Iwaki, and M. Okudaira, “Development of Motion Data Description Language for Robots Based on eXtensible Markup Language – Realization of Better Understanding and Communication via Networks,” J. Robot. Mechatron., Vol.14, No.5, pp. 471-478, 2002.
- [18] H. Tezuka, N. Katafuchi, Y. Nakamura, T. Machino, Y. Nanjo, S. Iwaki, and K. Shimokura, “Robot Platform Architecture for Information Sharing and Collaboration Among Multiple Networked Robots,” J. Robot. Mechatron., Vol.18, No.3, pp. 325-332, 2006.
- [19] K. Yane, K. Haraguchi, A. Sato, E. Aramaki, I. Miyashiro, and A. Nadamoto, “An Experiment of Laughter for Cancer Patients using Manzai Robots,” IEICE Technical Report, Vol.119, No.201, DE2019-20, pp. 29-34, 2019 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.