Paper:
Analysis of Fast Bipedal Walking Using Mechanism of Actively Controlled Wobbling Mass
Yuta Hanazawa*1, Terumitsu Hayashi*2, Masaki Yamakita*3, and Fumihiko Asano*4
*1Department of Mechanical and Control Engineering, Kyushu Institute of Technology
1-1 Sensui, Tobata, Kitakyushu, Fukuoka 804-8550, Japan
*2Yaskawa Electric Corporation
2-1 Kurosaki-shiroishi, Yahata-nishi, Kitakyushu, Fukuoka 806-0004, Japan
*3Department of Mechanical and Control Engineering, Tokyo Institute of Technology
2-12-1 Ookayama, Meguro-ku, Tokyo 152-8552, Japan
*4School of Information Science, Japan Advanced Institute of Science and Technology
1-1 Asahidai, Nomi, Ishikawa 923-1292, Japan

In this study, a novel approach was developed to achieve fast bipedal walking by using an actively controlled wobbling mass. Bipedal robots capable of achieving energy efficient limit cycle walking have been developed, and researchers have studied methods to increase their walking speed. When humans walk, their arm swinging is coordinated with the walking phases, generating a regular symmetrical motion about the torso. The bipedal robots with a wobbling mass in the torso mimicked the arm swinging by the proposed control method. We demonstrated that the proposed method is capable of increasing the bipedal walking speed.
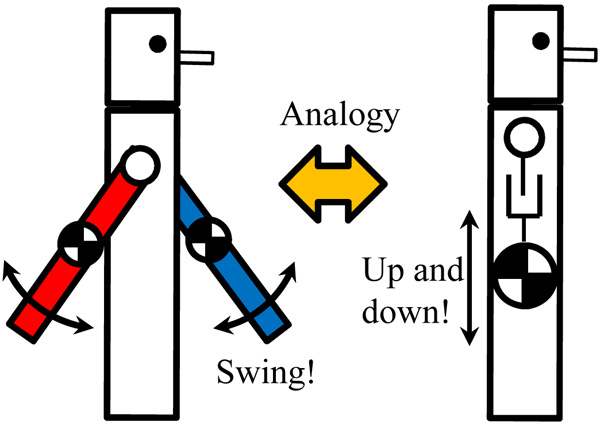
Analogy between swinging arms and wobbling mass
- [1] T. McGeer, “Passive dynamic walking,” The Int. J. of Robotics Research, Vol.9, No.2, pp. 62-82, 1990.
- [2] S. H. Collins and A. Ruina, “A bipedal walking robot with efficient and human-like gait,” Proc. of IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 1983-1988, 2005.
- [3] F. Asano and Z. W. Luo, “Efficient dynamic bipedal walking using effects of semicircular feet,” Robotica, Vol.29, No.3, pp. 351-365, 2011.
- [4] F. Asano and Z. W. Luo, “Energy-efficient and high-speed dynamic biped locomotion based on principle of parametric excitation,” IEEE Trans. on Robotics, Vol.24, No.6, pp. 1289-1301, 2008.
- [5] Y. Banno, K. Taji, Y. Harata, and K. Seta, “A modified kneed biped real robot based on parametric excitation principle,” Automation Control and Intelligent Systems, Vol.2, No.5, pp. 93-99, 2014.
- [6] D. Hobbelen and M. Wisse, “Controlling the walking speed in limit cycle walking,” The Int. J. of Robotics Research, Vol.27, No.9, pp. 989-1005, 2008.
- [7] Y. Hanazawa, H. Suda, Y. Iemura, and M. Yamakita, “Active walking robot mimicking at-footed passive dynamic walking,” Proc. of IEEE Int. Conf. on Robotics and Biomimetics (ROBIO), pp. 1281-1286, 2012.
- [8] Y. Hanazawa and F. Asano, “Asymmetric swing-leg motions for speed-up of biped walking,” J. Robot. Mechatron., Vol.29, No.3, pp. 490-499, 2017.
- [9] R. Bao and T. Geng, “Fast walking with rhythmic sway of torso in a 2D Passive Ankle Walker,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4363-4368, 2018.
- [10] D. Hobbelen and M. Wisse, “Limit cycle walking,” M. Hackel (Ed.), “Humanoid Robots: Human-like Machines,” pp. 277-294, IntechOpen, 2007.
- [11] L. Rome, L. Flynn, and T. Yoo, “Biomechanics: Rubber bands reduce the cost of carrying loads,” Nature, Vol.444, No.7122, pp. 1023-1024, 2006.
- [12] D. Tanaka, F. Asano, and I. Tokuda, “Gait analysis and efficiency improvement of passive dynamic walking of combined rimless wheel with wobbling mass,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 151-156, 2012.
- [13] S. H. Collins, P. G. Adamczyk, and A. D. Kuo, “Dynamic arm swinging in human walking,” Proc. of the Royal Society B: Biological Sciences, Vol.276, No.1673, pp. 3679-3688, 2009.
- [14] Y. Hanazawa and F. Asano, “High-speed biped walking using swinging-arms based on principle of up-and-down wobbling mass.” Proc. of IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 5191-5196, 2015.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.