News:
Centipede Type Robot i-CentiPot: From Machine to Creatures
Koichi Osuka*, Tetsuya Kinugasa**, Ryota Hayashi**, Koji Yoshida**, Dai Owaki***, and Akio Ishiguro***
*Osaka University
2-1 Yamadaoka, Suita, Osaka 565-0871, Japan
**Okayama University of Science
1-1 Ridai-cho, Kita-ku, Okayama, Okayama 700-0005, Japan
***Tohoku University
2-1-1 Katahira, Aoba-ku, Sendai 980-8577, Japan

In this study, we have developed a centipede-like multi-legged robot named i-CentiPot. This robot was developed to demonstrate our concept presented in the CREST project. In the project, we show that the existence of implicit control is important. i-CentiPot plays the part of the anchor example for our project.*
* This article is a translation from the article: K. Osuka et al., “Centipede type robot i-CentiPot: From machine to creatures,” The 8th Conf. of Transdisciplinary Federation of Science and Technology, D-2-4, 2017 (in Japanese).
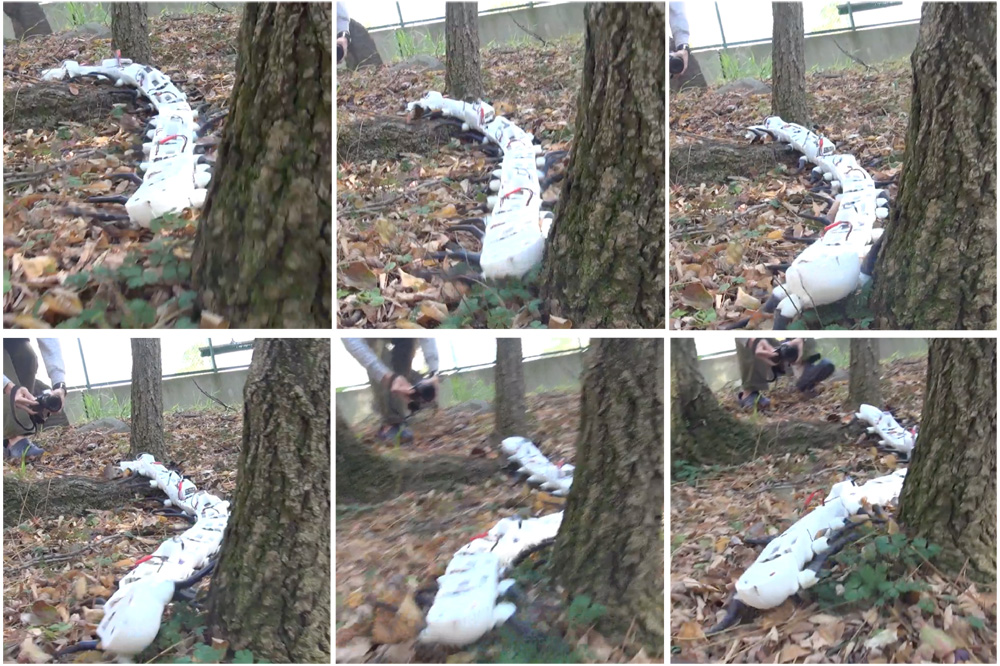
Obstacle-avoidance ability of i-CentiPot
- [1] R. Noda, T. Nakata, T. Ikeda, D. Chen, Y. Yoshinaga, K. Ishibashi, C. Rao, and H. Liu, “Development of Bio-Inspired Low-Noise Propeller for a Drone,” J. Robot. Mechatron., Vol.30, No.3, pp. 337-343, 2018.
- [2] R. Hayashi, S. Tsujio, and Y. Yu, “Remote Control Mechanism for the Crawler-type Robot by use of Flexible Shafts,” J. of the Robotics Society of Japan, Vol.25, No.3, pp. 422-428, 2007.
- [3] K. Osuka, A. Ishiguro, X.-Z. Zheng, Y. Sugimoto, and D. Owaki, “Implicit Control Law Embedded in Control System Solves Problem of Adaptive Function!?,” J. of the Robotics Society of Japan, Vol.28, No.4, pp. 491-502, 2010.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.