Paper:
One-DOF Wire-Driven Robot Assisting Both Hip and Knee Flexion Motion
Tamon Miyake*1, Yo Kobayashi*2,*3, Masakatsu G. Fujie*3, and Shigeki Sugano*4
*1Graduate School of Creative Science and Engineering, Waseda University
2-4-12 Okubo, Shinjuku-ku, Tokyo 169-0072, Japan
*2Graduate School of Engineering Science, Osaka University
1-3 Machikaneyama, Osaka 560-8531, Japan
*3Future Robotics Organization, Waseda University
2-4-12 Okubo, Shinjuku-ku, Tokyo 169-0072, Japan
*4Faculty of Science and Engineering, Waseda University
2-4-12 Okubo, Shinjuku-ku, Tokyo 169-0072, Japan

Gait assistance robots are used to improve gait performance ability or perform gait motion with an assistance for several articular motions. The sparing use of a gait assistance robot to decrease the duration of the robot’s assistance is important for keeping the ability to perform a movement when the robot assists walking. In previous research, methods of ensuring a compliance mechanism and control method have been studied, and assistance for articular motions has been conducted independently using actuators corresponding to each articular motion. In this paper, we propose a wire-driven gait assistance robot to aid both hip and knee articular flexion motions by applying just one force to assist motion in the swing phase. We focused on a force that assists hip and knee flexion motion, and designed a robot with a compensation mechanism for the wire length. We used an assistance timing detection method for the robot, conducting tensile force control based on information from the hip, knee, and ankle angles. We carried out an experiment to investigate the controlled performance of the proposed robot and the effect on hip and knee angular velocity. We confirmed that the proposed robotic system can aid both hip and knee articular motion with just one force application.
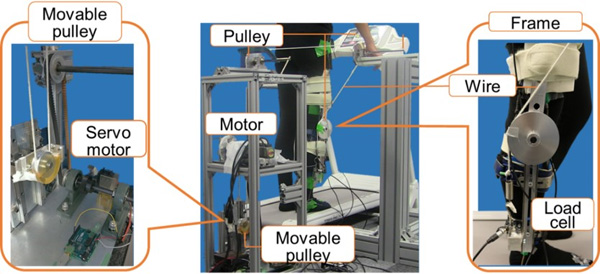
Proposed wire-driven gait assistance robot
- [1] W. Meng, Q. Liu, Z. Zhou, Q. Ai, B. Sheng, and S. S. Xie, “Recent development of mechanisms and control strategies for robot-assisted lower limb rehabilitation,” Mechatronics, Vol.31, pp. 132-145, 2015.
- [2] A. J. Young and D. P. Ferris, “State of the Art and Future Directions for Lower Limb Robotic Exoskeletons,” IEEE Trans. Neural Syst. Rehabil. Eng., Vol.25, No.2, pp. 171-182, 2017.
- [3] A. Duschau-Wicke, J. von Zitzewitz, A. Caprez, L. Lunenburger, and R. Riener, “Path control: A Method for Patient-Cooperative Robot-Aided Gait Rehabilitation,” IEEE Trans. Neural Syst. Rehabil. Eng., Vol.18, No.1, pp. 38-48, 2010.
- [4] A. Esquenazi, M. Talaty, A. Packel, and M. Saulino, “The ReWalk powered exoskeleton to restore ambulatory function to individuals with thoracic-level motor-complete spinal cord injury,” Am. J. Phys. Med. Rehabil., Vol.91, No.11, pp. 911-921, 2012.
- [5] S. H. Collins, M. B. Wiggin, and G. S. Sawicki, “Reducing the energy cost of human walking using an unpowered exoskeleton,” Nature, Vol.522, pp. 212-215, 2015.
- [6] L. M. Mooney, E. J. Rouse, and H. M. Herr, “Autonomous exoskeleton reduces metabolic cost of human walking,” J. Neuroeng. Rehabil., Vol.11, No.1, p. 80, 2014.
- [7] M. W. Bortz II and M. D. Palo Alto, “The disuse syndrome,” West J. Med., Vol.141, No.5, pp. 691-694, 1984.
- [8] R. Riener, L. Lünenburger, and G. Colombo, “Human-centered robotics applied to gait training and assessment,” J. Rehabil. Res. Dev., Vol.43, No.5, pp. 679-694, 2006.
- [9] R. Riener, L. Lünenburger, S. Jezernik, M. Anderschitz, G. Colombo, and V. Dietz, “Patient-cooperative strategies for robot-aided treadmill training: first experimental results,” IEEE Trans. Neural Syst. Rehabil. Eng., Vol.13, No.3, pp. 380-394, 2005.
- [10] S. Hussain, S. Q. Xie, and P. K. Jamwal, “Adaptive impedance control of a robotic orthosis for gait rehabilitation,” IEEE Trans. on Cybernetics, Vol.43, No.3, pp. 1025-1034, 2013.
- [11] S. K. Banala, S. H. Kim, S. K. Agrawal, and J. P. Scholz, “Robot assisted gait training with active leg exoskeleton (ALEX),” IEEE Trans. Neural Syst. Rehabil. Eng., Vol.17, No.1, pp. 2-8, 2009.
- [12] J. Meuleman, E. van Asseldonk, G. van Oort, H. Rietman, and H. van der Kooij, “LOPES II – Design and evaluation of an admittance controlled gait training robot with shadow-leg approach,” IEEE Trans. Neural Syst. Rehabil. Eng., Vol.24, No.3, pp. 352-363, 2016.
- [13] K. Nomura, T. Yonezawa, H. Takemura, and H. Mizoguchi, “Development of Six-DOF Human Ankle Motion Control Device Using Stewart Platform Structure for Fall Prevention,” J. Robot. Mechatron., Vol.28, No.5, pp. 654-663, 2016.
- [14] S. Lee, S. Crea, P. Malcolm, I. Galiana, A. Asbeck, and C. Walsh, “Controlling negative and positive power at the ankle with a soft exosuit,” 2016 IEEE Int. Conf. Robotics and Automation (ICRA), Stockholm, Sweden, pp. 3509-3515, 2016.
- [15] J. Zhang, P. Fiers, K. A. Witte et al., “Human-in-the-loop optimization of exoskeleton assistance during walking,” Science, Vol.356, Issue 6344, pp. 1280-1284, 2017.
- [16] Y. Ding, I. Galiana, A. Asbeck et al., “Multi-joint Actuation Platform for Lower Extremity Soft Exosuit,” 2014 IEEE Int. Conf. Robotics and Automation (ICRA), Hong Kong, China, 2014.
- [17] G. S. Sawicki and D. P. Ferris, “A pneumatically powered knee-ankle-foot orthosis (KAFO) with myoelectric activation and inhibition,” J. Neuroeng. Rehabil., Vol.6, No.1, p. 23, 2009.
- [18] S. Ishiduka, H. Oshima, S. Aoi et al., “Kinematic analysis of low dimensional structure in walking and running,” 2015 Int. Symp. on Micro-NanoMechatronics and Human Science, pp. 23-25, 2015.
- [19] J. Perry and J. M. Burnfield, “Gait Analysis: Normal and Pathological Function,” Ishiyaku Publishers, pp. 2-2 / 51-62, 2007.
- [20] P. Levinger, D. T. Lai, H. B. Menz et al., “Swing limb mechanics and minimum toe clearance in people with knee osteoarthritis,” Gait Posture, Vol.35, pp. 277-281, 2012.
- [21] S. Shin, S. Demura, T. Watanabe et al., “Age-related and obstacle height-related differences in movements while stepping over obstacles,” J. Physiol. Anthropol., Vol.34, No.1, pp. 15-1-15-10, 2015.
- [22] T. Funato, S. Aoi, H. Oshima, and K. Tsuchiya, “Variant and invariant patterns embedded in human locomotion through whole body kinematic coordination,” Experimental Brain Research, Vol.205, No.4, pp. 497-511, 2010.
- [23] Y. P. Ivanenko, G. Cappellini, N. Dominici, R. E. Poppele, and F. Lacquaniti, “Modular control of limb movements during human locomotion,” J. Neurosci., Vol.27, No.41, pp. 11149-11161, 2007.
- [24] P. DeVita and T. Hortobagyi, “Age causes a redistribution of joint torques and powers during gait,” J. Appl. Physio., Vol.88, No.5, pp. 1804-1811, 2000.
- [25] P. M. Mills, R. S. Barrett, and S. Morrison, “Toe clearance variability during walking in young and elderly men,” Gait and Posture, Vol.28, No.1, pp. 101-107, 2008.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.