Paper:
Dynamic Simulation of 1-DOF Swing Motion Propulsion Mechanism by Rotary Actuator
Nobuhiko Miyamoto*,**, Noriaki Ando*,**, and Kazuyoshi Wada*
*Graduate School of System Design, Tokyo Metropolitan University
6-6 Asahigaoka, Hino, Tokyo 191-0065, Japan
**Robot Innovation Research Center, National Institute of Advanced Industrial Science and Technology (AIST)
Central 2, 1-1-1 Umezono, Tsukuba, Ibaraki 305-8568, Japan

In this study, we aimed to develop a mobile robot that can move forward, turn, and move backward using one actuator. We previously proposed 1-DOF swing motion drive mechanisms for a mobile robot that uses linear actuators. This paper proposes a 1-DOF swing motion robot with a rotary actuator for realizing simple design and cost reduction. First, this paper describes a wheel posture switching mechanism. Next, we examine the dynamics modeling of a mobile robot and the wheel posture switching mechanism. Finally, the results are investigated through dynamic simulations to determine the forward-movement characteristics of the proposed mechanism.
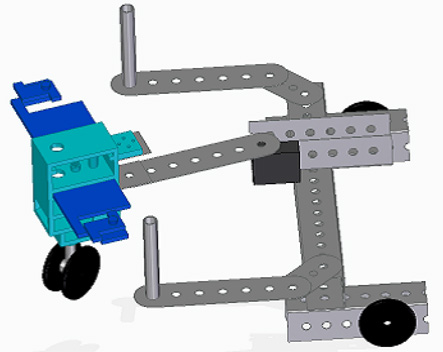
Image of 1-DOF swing motion propulsion mechanism
- [1] G. Endo and S. Hirose, “Study on Roller-Walker (multi-mode steering control and self-contained locomotion),” Int. Conf. on Robotics and Automation (ICRA), pp. 2808-2817, doi: 10.1109/ROBOT.2000.846453, 2000.
- [2] Y. Ota and Y. Igeta, “Research on the gliding locomotion robot, para-glider,” Proc. of the 2012 IEEE/SICE Int. Symp. on System Integration (SII2012), pp. 206-211, doi: 10.1109/SII.2012.6426948, 2012.
- [3] G. Endo, H. Yamada, T. Aoki, and S. Hirose, “Development of Biologically Inspired Educational Robots Based on Gliding Locomotion,” Int. Conf. on Intelligent Robots and Systems (IROS), pp. 3291-3296, doi: 10.1109/IROS.2013.6696824, 2013.
- [4] H. Yamaguchi, “Control of A New Type of Undulatory Wheeled Locomotor: A Trident Steering Walker Based on Chained Form,” J. Robot. Mechatron., Vol.21, No.4, pp. 541-553, doi: 10.20965/jrm.2009.p0541, 2009.
- [5] M. Kumagai and K. Tamada, “Wheel Locomotion of a Biped Robot Using Passive Rollers – Large Biped Robot Roller Walking Using a Variable-Curvature Truck –,” J. Robot. Mechatron., Vol.20, No.2, pp. 206-212, doi: 10.20965/jrm.2008.p0206, 2008.
- [6] K. Hashimoto, Y. Sugahara, H.-O. Lim, and A. Takanishi, “Swizzle Movement for Biped Walking Robot Having Passive Wheels,” J. Robot. Mechatron., Vol.20, No.3, pp. 413-419, doi: 10.20965/jrm.2008.p0413, 2008.
- [7] M. Li, S. Guo, H. Hirata, and H. Ishihara, “A roller-skating/walking mode-based amphibious robot,” Robotics and Computer-Integrated Manufacturing, Vol.44, pp. 17-29, doi: 10.1016/j.rcim.2016.06.005, 2017.
- [8] P. S. Krishnaprasad and D. P. Tsakiris, “Snakes and Motion Control: A Study of the Roller Racer,” J. of Dynamical Systems, Vol.16, pp. 347-397, doi: 10.1109/CDC.1995.478543, 2001.
- [9] A. Lewis, J. Ostrowski, R. Murray, and J. Burdick, “Nonholonomic mechanics and locomotion: the snakeboard example,” Proc. of the 1994 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 2391-2400, doi: 10.1109/ROBOT.1994.351153, 1994.
- [10] K. Kinugasa, M. Ishikawa, and K. Osuka, “Modeling and Control of Casterboard Robot,” Trans. of the Society of Instrument and Control Engineers, Vol.49, No.8, pp. 755-762, doi: 10.9746/sicetr.49.755, 2013 (in Japanese).
- [11] Y. Sato and F. Gao, “Drive Mechanism using Swing Motion,” Trans. of the JSME, Series C, Vol.62, No.595, pp. 879-885, doi: 10.1299/kikaic.62.879, 1996 (in Japanese).
- [12] H. Mori, T. Nagamine, T. Ichijo, and Y. Sato, “Effects of friction on driving mechanism using motion,” Trans. of the JSME, Vol.81, No.832, pp. 15-00330, doi: 10.1299/transjsme.15-00330, 2015 (in Japanese).
- [13] N. Miyamoto, N. Ando, K. Wada, and O. Matsumoto, “Dynamics analysis on the backward movement of 1-DOF swing motion propulsion mechanism by linear actuator,” The 18th SICE System Integration Division Annal Conf. (SI2017), pp. 1061-1064, 2017 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.