Paper:
Mechanism and Control of Connecting Robot Moving in Narrow and Irregular Terrain
Takahiro Doi, Motohiro Okumura, Tomoki Harada, and Yuto Mitsuma
Kanazawa Institute of Technology
7-1 Ohgigaoka, Nonoichi, Ishikawa 921-8812, Japan

Japan is located in a seismic zone and is hence affected by earthquakes, which necessitates frequent disaster rescue activities. It is difficult for humans to access the site of an earthquake with collapsed buildings for carrying out rescue operations. The use of various mobile robots to undertake such rescue activities in place of humans has been proposed and studied to cope with such situations. Disaster sites covered with debris contain narrow spaces and irregular terrains, where robots that can change its size and rigidity should be able to move more effectively. In this study, we propose a robot system, separated into multiple robot units and variable in size and rigidity by connecting and separating them, so that it can adapt itself to a diversity of environments. To realize the proposed robot system in both mechanical and control aspects, we prototyped a group of robot units that can move as well as get connected and separated. We evaluated its thrust and ability to traverse irregular terrains as well as the automatic connection of robot units using cameras and markers.
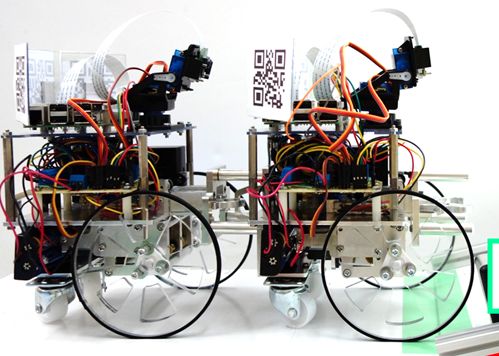
Variable constraints connection
- [1] K. Nagatani, S. Kiribayashi, Y. Okada, K. Otake, K. Yoshida, S. Tadokoro, T. Nishimura, T. Yoshida, E. Koyanagi, M. Fukushima, and S. Kawatsuma, “Emergency response to the nuclear accident at the Fukushima Daiichi Nuclear Power Plants using mobile rescue robots,” J. of Field Robotics, Vol.30, No.1, pp. 44-63, doi: 10.1002/rob.21439, 2013.
- [2] M. Schwarz, T. Rodehutskors, D. Droeschel, M. Beul, M. Schreiber, N. Araslanov, I. Ivanov, C. Lenz, J. Razlaw, S. Schüller, D. Schwarz, A. Topalidou-Kyniazopoulou, and S. Behnke, “NimbRo Rescue: Solving Disaster-response Tasks withthe Mobile Manipulation Robot Momaro,” J. of Field Robotics, Vol.34, No.2, pp. 400-425, doi: 10.1002/rob.21677, 2017.
- [3] K. Nagatani et al. “Redesign of rescue mobile robot Quince,” 2011 IEEE Int. Symp. on Safety, Security, and Rescue Robotics (SSRR), doi: 10.1109/SSRR.2011.6106794, 2011.
- [4] M. Okumura and T. Doi, “Coupling Mechanism with Variable Bending Rigidity for Robots to Move in Narrow Uneven Terrain,” Proc. of Robotics and Mechatronics Conf. (Robomech), 2A1-D08, 2017 (in Japanese).
- [5] H. Yamada and S. Hirose, “Development of Practical 3-Dimensional Active Cord Mechanism ACM-R4,” J. Robot. Mechatron., Vol.18, No.3, pp. 305-311, doi: 10.20965/jrm.2006.p0305, 2006.
- [6] W. Qi, T. Kamegawa, and A. Gofuku, “Proposal of helical wave propagate motion for a snake robot to across a branch on a pipe,” 2016 IEEE/SICE Int. Symp. on System Integration (SII), doi: 10.1109/SII.2016.7844101, 2016.
- [7] T. Kamegawa, T. Yarnasaki, H. Igarashi, and F. Matsuno, “Development of the snake-like rescue robot “kohga”,” IEEE Int. Conf. on Robotics and Automation, Proc. ICRA’04, doi: 10.1109/ROBOT.2004.1302523, 2004.
- [8] H. Kurokawa, K. Tomita, A. Kamimura, S. Kokaji, T. Hasuo, and S. Murata, “Distributed Self-Reconfiguration of M-TRAN III Modular Robotic System,” The Int. J. of Robotics Research, Vol.27, Issues 3-4, pp. 373-386, doi: 10.1177/0278364907085560, 2008.
- [9] M. Guarnieri, I. Takao, E. F. Fukushima, and S. Hirose, “HELIOS VIII: Toward practical robots for search and rescue operations,” J. Robot. Mechatron., Vol.20, No.5, pp. 675-694, doi: 10.20965/jrm.2008.p0675, 2008.
- [10] V. Zykov, E. Mytilinaios, M. Desnoyer, and H. Lipson, “Evolved and Designed Self-Reproducing Modular Robotics,” IEEE Trans. on Robotics, Vol.23, No.2, pp. 308-319, doi: 10.1109/TRO.2007.894685, 2007.
- [11] A. Ansari, J. Whitman, B. Saund, and H. Choset, “Modular Platforms for Advanced Inspection, Locomotion, and Manipulation,” WM2017 Conf., pp. 1-11, 2017.
- [12] K. Scharfenberg, “Automatic Car Coupler,” US Patent 2161724A, 1937.
- [13] E. H. Janney, “Car-Couplings,” US Patent 138405A, 1873.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.