Paper:
Development of an IoT-Based Prosthetic Control System
Osamu Fukuda*, Yuta Takahashi**, Nan Bu***, Hiroshi Okumura*, and Kohei Arai*
*Saga University
1 Honjo-machi, Saga, Saga 840-8502, Japan
**Nara Institute of Science and Technology
8916-5 Takayama-cho, Ikoma, Nara 630-0192, Japan
***National Institute of Technology, Kumamoto College
2659-2 Suya, Koshi, Kumamoto 861-1102, Japan

This paper attempts to develop a novel prosthetic control system based on an Internet of Things (IoT) paradigm. The proposed method is able to employ not only information from muscle activities of the user and status of a prosthetic hand but also a wide range of data obtained from objects and items in the environment. The sensor data can be static features, dynamic statuses, and even contextual information of the operation. Fusion of these sensor data composes a rich information foundation to support multi-DoF and dexterous prosthetic hands. It is expected that much more reliable reasoning and more autonomous control decision can be developed using an IoT-based control system. The proposed method is verified with a case study using objects with simple sensor units and a Myo armband for electromyographic (EMG) signals.
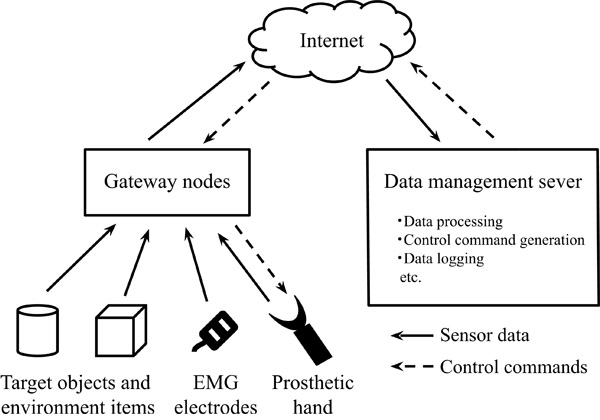
IoT-based prosthetic control system
- [1] C. Cipriani, M. Controzzi, and M. C. Carrozza, “The SmartHand transradial prosthesis,” J. Neuroeng. Rehabil., Vol.8, No.1, Article 29, 2011.
- [2] H. Liu, D. Yang, S. Fan, and H. Cai, “On the development of intrinsically-actuated, multisensory dexterous robotic hands,” Robomech. J., Vol.3, No.1, Article 4, 2016.
- [3] M. Atzori and H. Müller, “Control capabilities of myoelectric robotic prostheses by hand amputees: A scientific research and market overview,” Front. Syst. Neurosci., Vol.9, Article 162, 2015.
- [4] K. Englehart, B. Hudgins, and P. Parker, “Multifunction control of prostheses using the myoelectric signal,” H. L. Teodorescu and L. C. Jain (Eds.), Intelligent Systems and Technologies in Rehabilitation Engineering, CRC Press, pp. 153-208, 2001.
- [5] M. Ohga, M. Takeda, A. Matsuba, A. Koike, and T. Tsuji, “Development of a five-finger prosthetic hand using ultrasonic motors controlled by two EMG signals,” J. of Robotics and Mechatronics, Vol.14, No.6, pp. 565-572, 2002.
- [6] O. Fukuda, T. Tsuji, M. Kaneko, and A. Otsuka, “A human-assisting manipulator teleoperated by EMG signals and arm motions,” IEEE Trans. Rob. Autom., Vol.19, No.2, pp. 210-222, 2003.
- [7] M. A. Oskoei and H. Hu, “Myoelectric control systems – A survey,” Biomed. Signal Process. Control, Vol.2, pp. 275-294, 2007.
- [8] M. Tsukamoto, T. Kondo, and K. Ito, “A prosthetic hand control based on nonstationary EMG at the start of movement,” J. of Robotics and Mechatronics, Vol.19, No.4, pp. 381-387, 2007.
- [9] A. Fougner, Ø. Stavdahl, P. J. Kyberd, Y. G. Losier, and P. A. Parker, “Control of upper limb prostheses: Terminology and proportional myoelectric Control – A review,” IEEE Trans. Neural Syst. Rehabil. Eng., Vol.20, No.5, pp. 663-677, 2012.
- [10] S. Amsuess, P. Goebel, B. Graimann, and D. Farina, “A multi-class proportional myocontrol algorithm for upper limb prosthesis control: Validation in real-life scenarios on amputees,” IEEE Trans. Neural. Syst. Rehabil. Eng., Vol.23, No.5, pp. 827-836, 2015.
- [11] D. Farina, N. Jiang, H. Rehbaum, A. Holobar, B. Graimann, H. Dietl, and O. C. Aszmann, “The extraction of neural information from the surface EMG for the control of upper-limb prostheses: Emerging avenues and challenges,” IEEE Trans. Neural. Syst. Rehabil. Eng., Vol.22, No.4, pp. 797-809, 2014.
- [12] Y. Fang, N. Hettiarachchi, D. Zhou, and H. Liu, “Multi-modal sensing techniques for interfacing hand prostheses: A review,” IEEE Sensors J., Vol.15, No.11, pp. 6065-6076, 2015.
- [13] M. Markovic, S. Dosen, D. Popovic, B. Graimann, and D. Farina, “Sensor fusion and computer vision for context-aware control of a multi degree-of-freedom prosthesis,” J. Neural. Eng., Vol.12, No.6, Article 066022, 2015.
- [14] N. Bu, T. Tsuji, and O. Fukuda, “EMG-controlled human-robot interfaces: A hybrid motion and task modeling approach,” Y. Kurita and J. Ueda (Eds.), Human Modeling for Bio-inspired Robotics: Mechanical Engineering in Assistive Technologies, Academic Press, pp. 75-109, 2016.
- [15] A. Fougner, E. Scheme, A. D. C. Chan, K. Englehart, and Ø. Stavdahl, “A multi-modal approach for hand motion classification using surface EMG and accelerometers,” Proc. of the 33rd Ann. Int. Conf. IEEE Eng. Med. Biol. Soc., pp. 4247-4250, 2011.
- [16] L. Peng, Z. Hou, Y. Chen, W. Wang, L. Tong, and P. Li, “Combined use of sEMG and accelerometer in hand motion classification considering forearm rotation,” Proc. of the 35th Ann. Int. Conf. IEEE Eng. Med. Biol. Soc., pp. 4227-4230, 2013.
- [17] I. Kyranou, A. Krasoulis, M. S. Erden, K. Nazarpour, and S. Vijayakumar, “Real-time classification of multi-modal sensory data for prosthetic hand control,” Proc. of the 6th IEEE Int. Conf. on Biomedical Robotics and Biomechatronics, pp. 536-541, 2016.
- [18] S. Došen, C. Cipriani, M. Kostić et al., “Cognitive vision system for control of dexterous prosthetic hands: Experimental evaluation,” J. Neuroeng. Rehabil., Vol.7, No.1, Article 42, 2010.
- [19] J. DeGol, A. Akhtar, B. Manja, and T. Bretl, “Automatic grasp selection using a camera in a hand prosthesis,” Proc. of 38th Ann. Int. Conf. IEEE Eng. Med. Biol. Soc., pp. 431-434, 2016.
- [20] Y. Bando, N. Bu, O. Fukuda, H. Okumura, and K. Arai, “Object classification using a deep convolutional neural network and its application to myoelectric hand control,” Proc. of the 22nd Int. Symp. on Artificial Life and Robotics, pp. 454-457, 2017.
- [21] M. S. Trachtenberg, G. Singhal, R. Kaliki, R. J. Smith, and N. V. Thakor, “Radio frequency identification – An innovative solution to guide dexterous prosthetic hands,” Proc. of the 33rd Ann. Int. Conf. IEEE Eng. Med. Biol. Soc., pp. 3511-3514, 2011.
- [22] A. Whitmore, A. Agarwal, and L. D. Xu, “The internet of things – A survey of topics and trends,” Inf. Syst. Front., Vol.17, No.2, pp. 261-274, 2015.
- [23] S. M. R. Islam, D. Kwak, M. H. Kabir, M. Hossain, and K. S. Kwak, “The internet of things for health care: A comprehensive survey,” IEEE Access, Vol.3, pp. 678-708, 2015.
- [24] H. Karl and A. Willig, “Protocols and architectures for wireless sensor networks,” John Wiley & Sons, 2005.
- [25] T. Tsuji, O. Fukuda, H. Ichinobe, and M. Kaneko, “A log-linearized Gaussian mixture network and its application to EEG pattern classification,” IEEE Trans. Syst. Man Cybern. C, Vol.29, No.1, pp. 60-72, 1999.
- [26] K. H. Yeh, “A secure IoT-based healthcare system with body sensor networks,” IEEE Access, Vol.4, pp. 10288-10299, 2016.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.