Paper:
Adaptive Integral Sliding Mode Control via Fuzzy Logic for Variable Speed Wind Turbines
Yan Ren*1,*2,*3, Chuanli Gong*3, Dekuan Wang*3, and Dianwei Qian*4
*1China Three Gorges Corporation
No.1 Yuyuantan South Road, Haidian District, Beijing 100038, China
*2North China University of Water Resources and Electric Power
No.1 Jinshui East Road, Zhengzhou 450045, China
*3China Institute of Water Resources and Hydropower Research
A-1, Fuxing Road, Haidian District, Beijing 100038, China
*4School of Control and Computer Engineering, North China Electric Power University
No.2 Beinong Road, Changping District, Beijing 102206, China

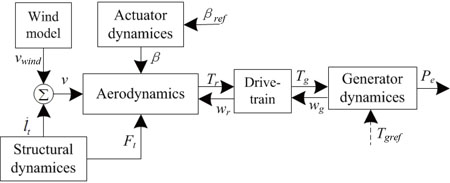
Schematic of a wind turbine
- [1] G. Gu, R. Hu, and Y. Li, “Study on identification of damage to wind turbine blade based on support vector machine and particle swarm optimization,” J. Robot. Mechatron., Vol.27, No.3, pp. 244-249, 2015.
- [2] D. Johnson and R. Erhardt, “Projected impacts of climate change on wind energy density in the United States,” Renew. Energy, Vol.85, pp. 66-73, 2016.
- [3] H. Li and Z. Chen, “Overview of different wind generator systems and their comparisons,” IET Renew. Power Gener., Vol.2, No.2, pp. 123-138, 2008.
- [4] M. Ma, H. Chen, X. Liu, and F. Allgöwer, “Moving horizon H-infinity control of variable speed wind turbines with actuator saturation,” IET Renew. Power Gener., Vol.8, No.5, pp. 498-508, 2014.
- [5] L. Xu and Y. Wang, “Dynamic modeling and control of DFIG-based wind turbines under, unbalanced network conditions,” IEEE Trans. Power Syst., Vol.22, No.1, pp. 314-323, 2007.
- [6] A. Lasheen and A. Elshafei, “Wind-turbine collective-pitch control via a fuzzy predictive algorithm,” Renew. Energy, Vol.87, pp. 298-306, 2016.
- [7] H. Camblong, S. Nourdine, I. Vechiu, and G. Tapia, “Comparison of an island wind turbine collective and individual pitch LQG controllers designed to alleviate fatigue loads,” IET Renew. Power Gener., Vol.6, No.4, pp. 267-275, 2012.
- [8] Z. Yang, Y. Li, and J. Seem, “Multi-model predictive control for wind turbine operation under meandering wake of upstream turbines,” Control Eng. Practice, Vol.45, pp. 37-45, 2015.
- [9] C. Caruana, A. Al-Durra, and F. Blaabjerg, “Observer-based scheme for tuning the control of variable speed wind turbines operating in hostile environments,” IET Renew. Power Gener., Vol.10, No.3, pp. 418-425, 2016.
- [10] H. Moradi and G. Vossoughi, “Robust control of the variable speed wind turbines in the presence of uncertainties: A comparison between H-infinity and PID controllers,” Energy, Vol.90, pp. 1508-1521, 2015.
- [11] M. Seker, E. Zergeroglu, and E. Tatlicioglu, “Non-linear control of variable-speed wind turbines with permanent magnet synchronous generators: a robust backstepping approach,” Int. J. Syst. Sci., Vol.47, No.2, pp. 420-432, 2016
- [12] D. Jena and S. Rajendran, “A review of estimation of effective wind speed based control of wind turbines,” Renew. Sust. Energ. Rev., Vol.43, pp. 1046-1062, 2015.
- [13] D. Wang, F. Li, S. Wen, X. Qi, P. Liu, and M. Deng, “Operator-based sliding-mode nonlinear control design for a process with input constraint,” J. Robot. Mechatron., Vol.27, No.1, pp. 83-90, 2015.
- [14] R. Akbar, B. Sumantri, H. Katayama, S. Sano, and N. Uchiyama, “Reduced-order observer based sliding mode control for a quad-rotor helicopter,” J. Robot. Mechatron., Vol.28, No.3, pp. 304-313, 2016.
- [15] D. Li and H. Gutierrez, “Quasi-sliding mode control of a high-precision hybrid magnetic suspension actuator,” J. Robot. Mechatron., Vol.25, No.1, pp. 192-200, 2013.
- [16] S. Boksuwan, T. Benjanarasuth, C. Kanamorim, and H. Aoyama, “Robust hybrid control for two-dimensional handheld micromanipulator,” J. Robot. Mechatron., Vol.26, No.3, pp. 331-340, 2014.
- [17] B. Beltran, T. Ahmed-Ali, and M. E. H. Benbouzid, “Sliding mode power control of variable-speed wind energy conversion systems,” IEEE Trans. Energy Convers., Vol.23, No.2, pp. 551-558, 2008.
- [18] C. Evangelista, P. Puleston, F. Valenciaga, and L. M. Fridman, “Lyapunov-Designed super-twisting sliding mode control for wind energy conversion optimization,” IEEE Trans. Ind. Electron., Vol.60, No.2, pp. 538-545, 2013.
- [19] C. Evangelista, F. Valenciaga, and P. Puleston, “Active and reactive power control for wind turbine based on a MIMO-sliding mode algorithm with variable gains,” IEEE Trans. Energy Convers., Vol.28, No.3, pp. 682-689, 2013.
- [20] M. Deng and N. Bu, “Robust control for nonlinear systems using passivity-based robust right coprime factorization,” IEEE Trans. Autom. Control, Vol.57, No.10, pp. 2599-2604, 2012.
- [21] C. Li, J. Yi and G. Zhang, “On the monotonicity of interval type-2 fuzzy logic systems,” IEEE Trans. Fuzzy Syst., Vol.22, No.5, pp. 1197-1212, 2014.
- [22] H. Yoshida, M. Omae, and T. Wada, “Toward next active safety technology of intelligent vehicle,” J. Robot. Mechatron., Vol.27, No.6, pp. 610-616, 2015.
- [23] D. Qian, S. Tong, and S. Lee, “Fuzzy-Logic-based control of payloads subjected to double-pendulum motion in overhead cranes,” Autom. Constr., Vol.65, pp. 133-143, 2016.
- [24] M. Corradini and G. Orlando, “Control of mobile robots with uncertainties in the dynamical model: a discrete time sliding mode approach with experimental results,” Contr. Eng. Pract., Vol.10, No.1, pp. 23-34, 2002.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.