Paper:
Autonomous Flight of Hexacopter Under Propulsion System Failure
Yi Yang*, Daisuke Iwakura**, Akio Namiki*, Kenzo Nonami*,**, and Wei Wang***
*Chiba University
1-33 Yayoi-cho, Inage-ku, Chiba 263-8522, Japan
**Autonomous Control Systems Laboratory Ltd.
1-33 Yayoi-cho, Inage-ku, Chiba 263-8522, Japan
***Nanjing University of Information Science and Technology
219 Ningliu Road, Pukou District, Nanjing, China

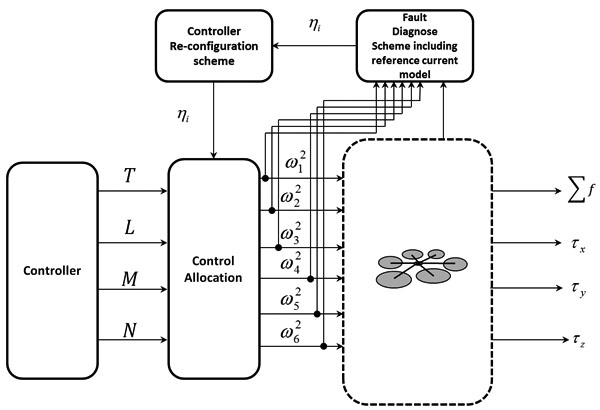
Fault tolerant control structure of hexacopter
- [1] M. W. Mueller, M. Hamer, and R. D’Andrea, “Fusing ultra-wideband range measurements with accelerometers and rate gyroscopes for quadrocopter state estimation,” IEEE Int. Conf. on Robotics and Automation (ICRA), 2015.
- [2] D. S. Maughan, I. T. Erekson, and R. Sharma, “Flying Inverted Pendulum Trajectory Control on Robust Intelligent Sensing and Control Multi-Agent Analysis Platform,” 2015 Int. Conf. on Unmanned Aircraft Systems (ICUAS), 2015.
- [3] K. Bipin, V. Duggal, and K. M. Krishna, “Autonomous Navigation of Generic Monocular Quadcopter in Natural Environment,” IEEE Int. Conf. on Robotics and Automation (ICRA), 2015.
- [4] A. Mokhtari and A. Benallegue, “Dynamic Feedback Controller of Euler Angles and Wind parameters estimation for a Quadrotor Unmanned Aerial Vehicle,” IEEE Int. Conf. on Robotics and Automation, 2004.
- [5] M. Blanke, M. Kinnaert, J. Lunze, and M. Staroswiecki, “Diagnosis and Fault-Tolerant Control 2nd Edition,” Springer, 2006.
- [6] H. A. Izadi, Y. Zhang, and B. W. Gordon, “Fault Tolerant Model Predictive Control of Quad-Rotor Helicopter with Actuator Fault Estimation,” Int. Federation of Autonomous Control (IFAC), 2011.
- [7] M. W. Mueller and R. D’ Andrea, “Stability and control of a quadrocopter despite the complete loss of one, two, or three propellers,” IEEE Int. Conf. on Robotics & Automation (ICRA), 2014.
- [8] A. Freddi, S. Longhi, A. Monteriu, and M. Prist, “Actuator Fault Detection and Isolation System for an Hexacopter,” 2014 IEEE/ASME 10th Int. Conf. on Mechatronic and Embedded Systems and Applications (MESA), 2014.
- [9] T. Schneider, G. Ducard, K. Rudin, and P. Stupler, “Fault-tolerant Control Allocation for Multirotor Helicopters using Parametric Programming,” Autonmous System Lab, ETH Zurich, Switzerland, 2012.
- [10] M. Frangenberg, J. Stephan, and W. Fichter, “Fast Actuator Fault Dedtection and Reconfiguration for Multicopters,” AIAA Guidance, Navigation, and Control Conf., 2015.
- [11] Y. Yang, K. Nonami, Y. Song, and D. Iwakura, “The Research of the Fail Safe System for Muti-Rotor Helicopter,” Dynamics and Desgin Conf. 2013, 2013.
- [12] G. J. J. Ducard and M. D. Hua, “Discussion and Practical Aspects on Control Allocation for a Multi-Rotor Helicopter,” Int. Archives of the photogrammetry, Remote Sensing and Spatial Information Science, Vol.XXXVIII-1/C22 UAV-g2011, 2011.
- [13] Y. Marks, J. F. Whidborne, and I. Yamamoto, “Control Allocation for Fault Tolerant Control of a VTOL Octorotor,” UKACC Int. Conf. on Control, 2012.
- [14] D. Vey and J. Lunze, “Structural reconfigurability and analysis of multirotor UAVs after actuator failures,” 2015 IEEE 54th Annual Conf. on Decision and Control (CDC), 2015.
- [15] I. Daisuke “Research on the indoor and outdoor autonomous flight of the multi-rotor helicopter,” Ph.D. thesis, Chiba University, 2013.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.