Development Report:
Upper Body of Dummy Humanoid Robot with Exterior Deformation Mechanism for Evaluation of Assistive Products and Technologies
Kunihiro Ogata*, Tomoya Kawamura**, Eiichi Ono*, Tsuyoshi Nakayama*, and Nobuto Matsuhira**
*Research Institute, National Rehabilitation Center for Persons with Disabilities
4-1 Namiki, Tokorozawa City, Saitama 359-8555, Japan
**Department of Engineering Science and Mechanics, College of Engineering, Shibaura Institute of Technology
3-7-5 Toyosu, Koto-ku, Tokyo 135-8548, Japan

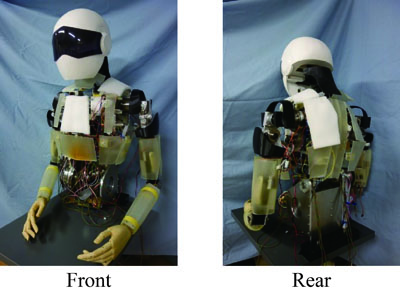
Dummy robot with exterior deformation mechanism
- [1] J. Jongjit, W. Sutharom, L. Komsopapong, N. Numpechitra, and P. Songjakkaew, “Functional Independence and Rehabilitation Outcome in Traumatic Spinal Cord Injury,” The Southeast Asian J. of Tropical Medicine and Public Health, Vol.35, No.4, pp. 980-985, 2004.
- [2] S. P. Hetz, A. E. Latimer, and K. A. Martin Ginis, “Activities of daily living performed by individuals with SCI: Relationships with physical fitness and leisure time physical activity,” Spinal Cord, Vol.47, No.7, pp. 550-554, 2009.
- [3] D. J. Gosnell, “Assessment and evaluation of pressure sores,” Nurs. Clin. North. Am, Vol.22, No.2, pp. 399-416, 1987.
- [4] H. Ishii and A. Takanishi, “Robotic patient simulator for medical skills training,” Trans. of Japanese Society for Medical and Biological Engineering, Vol.51, p. M-105, 2013.
- [5] Y. Imamura, T. Tanaka, K. Ayusawa, and E. Yoshida, “Verification of Assistive Effect Generated by Passive Power-Assist Device Using Humanoid Robot,” Proc. of the 2014 IEEE/SICE Int. Symposium on System Integration, pp. 761-766, 2014.
- [6] A. Abels and M. Kruusmaa, “Construction of a Female Shape-Changing Robotic Mannequin,” J. of Automation and Control Engineering, Vol.1, No.2, pp. 132-134, 2013.
- [7] F. M. Maynard, M. B. Bracken, G. Creasey, J. F. Ditunno, W. H. Donovan, T. B. Ducker, S. L. Garber, R. J. Marino, S. L. Stover, C. H. Tator, R. L. Waters, J. E. Wilberger, and W. Young, “International Standards for Neurological and Functional Classification of Spinal Cord Injury,” Spinal Cord, Vol.35, No.5, pp. 266-274, 1997.
- [8] A. C. Buchholz, C. F. McGillivray, and P. B. Pencharz, “Physical Activity Levels Are Low in Free-Living Adults with Chronic Paraplegia,” Obesity Research, Vol.11, No.4, pp. 563-570, 2003.
- [9] S. Ikemoto, F. Kannou, and K. Hosoda, “Humanlike shoulder complex for musculoskeletal robot arms,” 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 4892-4897, 2012.
- [10] I. A. Kapandji, “Anatomie Fonctiionnelle Tome 1, Membre superieur, 6e ed,” MALOINE, 2005 (in French).
ISBN: 9782224026479. - [11] T. Sugihara, “Solvability-unconcerned Inverse Kinematics based on Levenberg-Marquardt Method,” 2009 IEEE-RAS Int. Conf. on Humanoid Robots, pp. 555-560, Paris, Dec. 9th, 2009.
- [12] Y. Ohmura, Y. Kuniyoshi, and A. Nagakubo, “Conformable and Scalable Tactile Sensor Skin for Curved Surfaces,” Proc. IEEE Int. Conf. on Robotics and Automation, pp. 1348-1353, 2006.
- [13] Y. Ohmura and Y. Kuniyoshi, “Humanoid robot which can lift a 30kg box by whole body contact and tactile feedback,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems 2007 (IROS 2007), pp. 1136-1141, 2007.
- [14] M. Maggiali, G. Cannata, P. Maiolino, G. Metta, M. Randazzo, and G. Sandini, “Embedded Distributed Capacitive Tactile Sensor,” Mechatronics 2008, pp. 1-5, 2008.
- [15] M. Hayashi, T. Yoshikai, and M. Inaba, “Development of a Humanoid with Dis-tributed Multi-Axis Deformation Sense with Full-Body Soft Plastic Foam Cover as Flesh of a Robot,” InTech, 2008. DOI: 10.5772/6629.
- [16] H.-Y. Li, “Research on relationship between materials and internal function design of clothing,” Int. Conf. on Fibrous Materials 2009, pp. 1089-1092, 2009.
- [17] M .Tanaka, H. Noguchi, M. Fujikawa, M. Sato, S. Oi, T. Kobayashi, K. Furuichi, S. Ishimaru, and C. Nonomura, “Development of Large Strain Shell Elements for Woven Fabrics with Application to Clothing Pressure Distribution Problem,” Computer Modelling in Engineering and Sciences, Vol.62, No.3, pp. 265-290, 2010.
- [18] D. Chen and Y. Gan, “A Study on Clothing Pressure of the Men’s Suit for Comfort Evaluation – Relationship between Clothing Pressure and Clothing Comfort –, ” Clothing Research J., Vol.2, No.1, pp. 61-66, 2004.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.