Paper:
LED Panel Detection and Pattern Discrimination Using UAV’s On-Board Camera for Autoflight Control
Hiroyuki Ukida and Masafumi Miwa
Tokushima University
2-1 Minamijosanjima-cho, Tokushima 770-8506, Japan

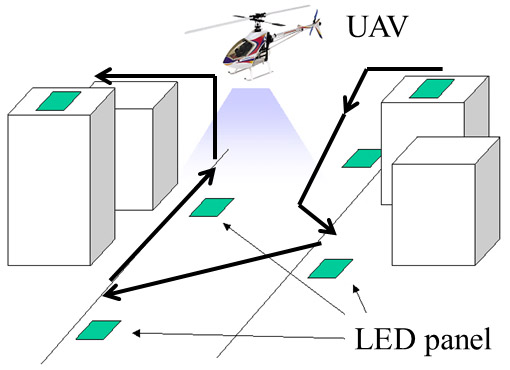
UAV autoflight control system using LED panels
- [1] M. Nakagawa, “Visible Light Communications,” ITEJ, Vol.60, No.12, pp. 1908-1913, 2006.
- [2] S. Kimura, Y. Kakehi, K. Takahashi, and T. Naemura, “A Basic Study on Ubiquitous Information Environment Using Pixel-Level Visible Light Communication Projector and High-Speed Camera,” IEICE, Vol.J91-D, No.12, pp. 2781-2790, 2008.
- [3] T. Yamazato, “Visible Light Communications Using LED Array and High-speed Camera for ITS Applications,” Fundamentals Review, Vol.3, No.2, pp. 45-53, 2009.
- [4] H. Ukida and M. Miwa, “Development of Information Transmission System by Dynamic 2D Patterns Using LED Panel and Video Camera,” Proc. of 17th Symposium on Sensing via Image Information (SSII2011), pp. IS4-06-1-IS4-06-7, 2011.
- [5] H. Ukida and M. Miwa, “Development of Information Communication System Using LED Panel and Video Camera,” IEEJ Trans. on Electronics, Information and Systems, Vol.133, No.1, pp. 8-17, 2013.
- [6] Y. Tsukuda, H. Ukida, M. Miwa, and N. Chatani, “Flight Control of UAV Using LED Panel and Video Camera,” Proc. of the 6th Int. Conf. on Positioning Technology (ICPT2014), pp. 234-239, 2014.
- [7] H. Kato et al., “Augmented Reality,” IPSJ, Vol.51, No.4, pp. 365-434, 2010.
- [8] R. C. Gonzales and R. E. Woods, “Digital Image Processing Second Edition,” Prentice Hall, 2002.
- [9] R. Jain, R. Kasturi and B. G. Schunck, “Machine Vision,” MIT Press, 1995.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.