Paper:
A Simple Autonomous Flight Control of Multicopter Using Only Web Camera
Kazuya Sato and Ryuichiro Daikoku
Department of Mechanical Engineering, Faculty of Science and Engineering, Saga University
1 Honjo, Saga, Saga 840-8502, Japan

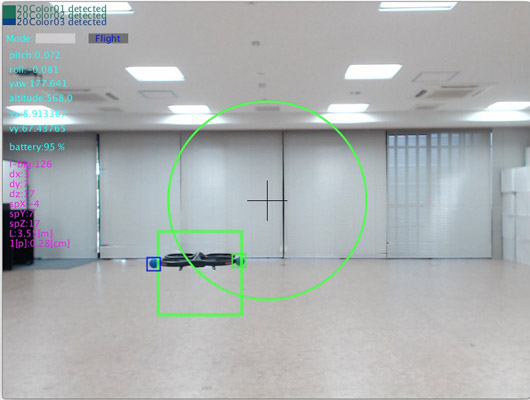
Autonomous circular flight of multicopter
- [1] A. Mokhtari, A. Benallegue, and A. Belaidi, “Polynomial Linear Quadratic Gaussians Sliding Mode Observer for a Quadrotor Unmanned Aerial Vehicle,” J. of Robotics and Mechatronics, Vol.17, No.4, pp. 483-495, 2005.
- [2] S. Bouabdallah and R. Siegwart, “Backstepping and Sliding-mode Techniques Applied to an Indoor Micro Quadrotor,” Proc. of the 2005 IEEE Int. Conf. on Robotics and Automation, pp. 2259-2264, 2005.
- [3] T. Madani and A. Benallegue, “Adaptive Control via Backstepping Technique and Neural Networks of a Quadrotor Helicopter,” Proc. of the 17th IFAC World Congress, Seoul, pp. 6513-6518, 2008.
- [4] A. Abdessameud and A. Tayebi, “Global trajectory tracking control of VTOL-UAVs without linear velocity measurements,” Automatica, Vol.46, No.6, pp. 1053-1059, 2010.
- [5] M. Yokoyama and K. Fujimoto, “Velocity Tracking Control of a Four-Rotor Mini Helicopter,” Motion and Vibration Control, pp. 335-344, 2009.
- [6] K. Fujimoto, M. Yokoyama, and Y. Tanabe, “Position and Yaw Angle Control for a Four Rotor Mini Helicopter Based on a Geometric Approach,” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.78, No.785, pp. 126-137, 2012 (in Japanese).
- [7] A. Astolfi, “Discontinuous control of nonholonomic systems,” System and Control Letters, Vol.27, pp. 37-45, 1996.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.