Review:
Research and Development of Functional Fluid Mechatronics, Rehabilitation Systems, and Mechatronics of Flexible Drive Systems
Junji Furusho* and Naoyuki Takesue**
*Osaka Electro-Communication University
18-8 Hatsucho, Neyagawa-shi, Osaka 572-8530, Japan
**Tokyo Metropolitan University
6-6 Asahigaoka, Hino-shi, Tokyo 191-0065, Japan

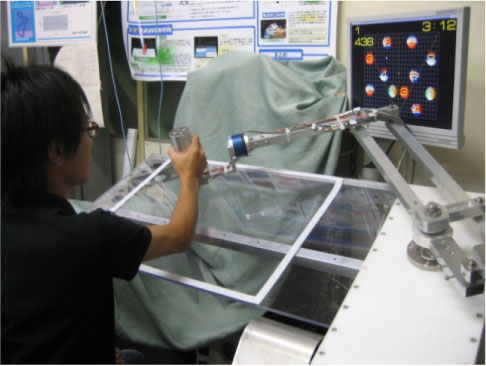
PLEMO-P3 Developed by Furusho Lab at Osaka Univ.
- [1] J. D. Carlson, D. M. Catanzarite, and K. A. St. Clair, “Commercial Magneto-Rheological Fluid Devices,” Proc. of the 5th Int. Conf. on ER Fluids, MR Suspensions and Associated Technology, World Scientific, pp. 20-28, 1995.
- [2] O. Ashour, C. A. Rogers, and W. Kordonsky, “Magnetorheological fluids: materials, characterization, and devices,” J. of Intelligent Material Systems and Structures, Vol.7, No.2, pp. 123-130, 1996.
- [3] R. Boelter and H. Janocha, “Design rules for MR fluid actuators in different working modes,” Proc. of SPIE The Int. Society for Optical Engineering, Vol.3045, pp. 148-159, 1997.
- [4] M. Yalcintas, “Magnetorheological Fluid Based Torque Transmission Clutches,” Proc. of The Int. Offshore and Polar Engineering Conf., Vol.4, pp. 563-569, 1999.
- [5] N. Takesue, M. Sakaguchi, and J. Furusho, “Improvement of Response Properties of MR-Fluid Actuator by Torque Feedback Control,” Proc. of the 2001 IEEE Int. Conf. on Robotics and Automation, Vol.4, pp. 3825-3830, 2001.
- [6] J. D. Carlson and M. R. Jolly, “MR fluid, foam and elastomer devices,” Mechatronics, Vol.10, pp. 555-569, 2000.
- [7] M. Muriuki and W. W. Clark, “Design issues in magnetorheological fluid actuators,” Proc. of the SPIE Conf. on Passive Damping and Isolation, Vol.3672, pp. 55-64, 1999.
- [8] D. Jeon, C. Park, and K. Park, “Vibration suppression by controlling an MR damper,” Proc. of the 6th Int. Conf. on Electro-Rheological Fluids, Magneto-Rheological Suspensions and their applications, pp. 853-860, 1997.
- [9] S. B. Choi, S. R. Hong, and C. C. Cheong, “Comparison of Field-Controlled Characteristics Between ER and MR Clutches,” J. of Intelligent Material Systems and Structures,” Vol.10, No.8, pp. 615-619, 1999.
- [10] N. Takesue, J. Furusho, and Y. Kiyota, “Fast Response MR-Fluid Actuator,” JSME Int. J., Series C, Vol.47, No.3, pp. 783-791, 2004.
- [11] Y. Yamaguchi, J. Furusho et al., “Development of High-Speed/High-Torque MR Actuator Using Silicon Steel Sheet,” Trans. JSME, (Ser.C), Vol.70, No.698, pp. 2886-2893, 2004 (in Japanese).
- [12] J. Furusho and K. Koyanagi, “(Review) Wearable Power Assist Systems Using Functional Fluids (Research and Development Based on Int. and Domestic Standards about Safety),” J. of the Japan Fluid Power System Society (JFPS), Vol.34, No.5, pp. 121-127, 2003 (in Japanese).
- [13] J. Noma, H. Abea, T. Kikuchi, J. Furusho, and M. Naito, “Magnetorheology of colloidal dispersion containing Fe nanoparticles synthesized by the arc-plasma method,” J. of Magnetism and Magnetic Materials, Vol.322, Iss.13, pp. 1868-1871, 2010.
- [14] W. M. Winslow, “Induced fibration suspension,” J. of Applied Physics, Vol.20, No.12, pp. 1137-1140, 1949.
- [15] T. C. Jordan and M. T. Shaw, “Electrorheology (Review Article),” IEEE Trans. on Electrical Insulation, Vol.24, pp. 849-878, 1989.
- [16] A. Inoue and S. Maniwa, “Electrorheological Effect of Liquid Crystalline Polymers,” J. of Applied Polymer Science, Vol.55, pp. 113-118, 1995.
- [17] N. Takesue, J. Furusho, and A. Inoue, “Electrorheological Effects of Liquid Crystalline Polymers on One-Sided Pattern Electrodes,” J. of Applied Physics, Vol.91, No.3, pp. 1618-1623, 2002.
- [18] N. Takesue, J. Furusho, and A. Inoue, “Influence of Electrode Configuration and Liquid Crystalline Polymer Type on Electrorheological Effect,” J. of Applied Physics, Vol.94, No.8, pp. 5367-5373, 2003.
- [19] T. Kikuchi, J. Fujiwara, J. Furusho, and A. Inoue, “Polishing Using ER Slurry on One-sided Patterned Electrodes,” Int. J. of Modern Physics B, Vol.19, No.7-9, pp. 1682-1688, 2005.
- [20] N. Takesue, M. Nishina, J. Furusho, and S. Kawata, “Robust Control of High-Speed Precise Positioning of Robot Arm with Flexible Drive System (The Case of Utilizing Hierarchical Design Method),” Trans. JSME, Ser. C, Vol.62, No.602, pp. 3858-3864, 1996 (in Japanese).
- [21] J. Furusho, A. Sano, and M. Nishina, “Robust Control of High-Speed Precise Positioning of Robot Arm with Flexible Drive System (The Case of Utilizing Both Information of Joint and Motor Angles),” Trans JSME, Ser. C, Vol.61, No.587, pp. 3032-3039, 1995 (in Japanese).
- [22] N. Takesue, J. Furusho, and K. Fujinaga, “Control Using Joint Torque Sensor of Robot Arm with Two Inertia Resonance (Comparison with Control Using State-Estimation Observer),” Electrical Engineering in Japan, Vol.156, No.2, pp. 75-84, 2006.
- [23] G. Zhang and J. Furusho, “Speed Control of Two-Inertia System by PI/PID Control,” IEEE Trans. on Industrial Electronics, Vol.47, No.3, pp. 603-609, 2000.
- [24] G. Zhang and J. Furusho, “Control of Three-inertia System by PI/PID Control,” Trans. of The Electrical Engineers of Japan, Ser.D, Vol.119-D, No.11, pp. 1386-1392, 1999.
- [25] G. Zhang and J. Furusho, “Systematic Analysis and Design on Two-Inertia System,” Trans. of SICE (The Society of Instrument and Control Engineers), Vol.35, No.1, pp. 105-112, 1999.
- [26] G. Zhang and J. Furusho, “A Practical PID Controller Design for Speed Servo System,” Trans. of The Electrical Engineers of Japan, Ser.D, Vol.118-D, No.9, pp. 1095-1096, 1998.
- [27] G. Zhang, J. Furusho, and A. Sano, “Force Control of Manipulators Based on H∞ Controller (Application of Joint Torque Feedback),” J. of Robotics and Mechatronics, Vol.7, No.5, pp. 410-418, 1995.
- [28] J. Furusho, H. Nagao, and M. Naruse, “Multivariable Root Loci of Control Systems of Robot Manipulators with Flexible Driving Systems (Distortion Feedback),” JSME Int. J., Ser.III, Vol.35, No.1, pp. 65-73, 1992.
- [29] N. Takesue, G. Zhang, J. Furusho, and M. Sakaguchi, “Precise Position Control of Robot Arms Using a Homogeneous ER Fluid,” IEEE Control Systems Magazine, Vol.19, No.2, pp. 55-61, 1999.
- [30] N. Takesue, G. Zhang, J. Furusho, and M. Sakaguchi, “Motion Control of Direct-Drive Motor by a Homogeneous ER Fluid,” J. of Intelligent Material Systems and Structures, Vol.10, No.9, pp. 728-731, 1999.
- [31] N. Takesue, G. Zhang, J. Furusho, M. Sakaguchi, and H. Asawa, “Development of an Actuator with ER Damper and Its Basic Experiments,” J. of Intelligent Material Systems and Structures, Vol.10, No.9, pp. 723-727, 1999.
- [32] J. Zhang, J. Furusho, M. Uda, and T. Yamaguchi, “Development of A New Linear Guide System with Electrically Controllable Damping Using Liquid Crystalline Polymer,” Proc. of the 9th Int. Conf. on ER Fluids and MR Suspensions(ERMR04), pp. 902-908, 2005.
- [33] J. Furusho and N. Takesue, Chapter 4: Dynamics and Control of Biped Locomotion, “Dynamics and Control of Biological System” Japan Society of Mechanical Engineers (Ed.), Youkendou, pp. 105-154, 2002 (in Japanese).
- [34] J. Furusho, “(Review) A Control Study Dynamical Biped Locomotion Robot (A Low Order Model and a Hierarchical Control Strategy),” J. of Robotics Society of Japan, Vol.1, No.3, pp. 22-30, 1983 (in Japanese).
- [35] J. Furusho and M. Masubuchi, “Control of a Dynamical Biped Locomotion System for Steady Walking,” Trans. ASME, J. of Dynamic Systems, Measurement and Control, Vol.108, pp. 111-118, 1986.
- [36] J. Furusho and M. Masubuchi, “A Theoretically Motivated Reduced Order Model for the Control of Dynamic Biped Locomotion,” Trans. ASME, J. of Dynamic Systems, Measurement and Control, Vol.109, pp. 155-163, 1987.
- [37] J. Furusho and A. Sano, “Sensor-Based Control of a Nine-Link Biped,” Int. J. of Robotics Research, Vol.9, No.2 (Special Issue on Legged Locomotion), pp. 83-98, 1990.
- [38] J. Furusho, A. Sano, and Y. Okajima, “A Consideration on a Dynamic Control Method for Quadruped Walking Robots,” J. of Robotics and Mechatronics, Vol.5, No.6, pp. 526-528, 1992.
- [39] A. Sano and J. Furusho, “Evaluation of a Reduced Order Model for Quadruped System and Proposition of a Walking Control Method Using Quasi-Angular-Momentum,” J. of Robotics and Mechatronics, Vol.5, No.6, pp. 582-583, 1993.
- [40] A. Sano, J. Furusho, and A. Hashiguchi, “Basic Study of Quadruple Locomotion System with Capability of Adjust Compliance,” J. of Robotics and Mechatronics, Vol.5, No.6, pp. 561-569, 1993.
- [41] J. Furusho, N. Takesue, S. Nakagaki, T. Tsuda, A. Nakagawa, and S. Morimoto, “Development of Intelligent Prosthetic Ankle Joint (1st Report: Development of Linear-Type MR-Fluid Brake),” Trans. JSME, Ser.C, Vol.70, No.695, pp. 2163-2170, 2004 (in Japanese).
- [42] J. Furusho, T. Kikuchi, M. Morimoto, M. Tokuda, C. Li, Y. Hashimoto, N. Nakagawa, and Y. Akazawa, “Research and Development of the Limbs Orthosis Intelligently Controlled by Shear-Type Compact MR Brake (1st Report),” J. of Robotics Society of Japan, Vol.25, No.6, pp. 867-873, 2007 (in Japanese).
- [43] J. Furusho, T. Kikuchi, M. Tokuda, T. Kakehashi, K. Ikeda, S. Morimoto, Y. Hashimoto, H. Tomiyama, A. Nakagawa, and Y. Akazawa, “Development of Shear Type Compact MR Brake for the Intelligent Ankle-Foot Orthosis and Its Control (Research and Development in NEDO for Practical Application of Human Support Robot),” Proc. of IEEE Int. Conf. on Rehabilitation Robotics 2007 (ICORR2007), pp. 89-94, 2007.
- [44] J. Furusho, M. Sakaguchi, N. Takesue, F. Sato, T. Naruo, and H. Nagao, “Development of a Robot for Evaluating Tennis Rackets,” J. of Robotics and Mechatronics, Vol.13, No.1, pp. 74-79, 2001.
- [45] J. Furusho, K. Koyanagi, J. Kataoka, U. Ryu, A. Inoue, and T. Takenaka, “Development of 3-D Rehabilitation System for Upper Limb (1st Report: Development of Mechanism Including ER Actuators and Whole Systems),” Jourrnal of the Robotics Society of Japan, Vol.23, No.5, pp. 629-636, 2005 (in Japanese).
- [46] J. Furusho et al., “Development of Rehabilitation Robot System with Functional Fluid Devices for Upper Limbs,” Proc. of The 8th Int. Conf. on Rehabilitation Robotics (ICORR 2003), pp. 31-34, 2003.
- [47] J. Furusho, “(Preface) Rehabilitation Support Robot for Upper Extremities and Their Full-Scale Practical Use,” Sogo Rehabilitation, Vol.38, No.12, 2010 (in Japanese).
- [48] J. Furusho, “(Review) Application of Robotics Technology to Rehabilitation System for Upper and Lower Extremities and Nursing Care Systems,” Sogo Rehabilitation, Vol.35, No.5, pp. 439-445, 2007 (in Japanese).
- [49] K. Miyakoshi, K. Domen, T. Koyama, J. Furusho, and K. Koyanagi, “The effect of Robot-aided training on motor recovery following stroke,” The Japanese J. of Rehabilitation Medicine, Vol.43, No.6, pp. 47-352, 2006 (in Japanese).
- [50] J. Furusho, K. Koyanagi, Y. Imada, Y. Fujii, K. Nakanishi, K. Domen, K. Miyakoshi, U. Ryu, S. Takenaka, and A. Inoue, “A 3-D Rehabilitation System for Upper Limbs Developed in a 5-year NEDO Project and Its Clinical Testing,” Proc. of 9th Int. Conf. on Rehabilitation Robotics (ICORR2005), pp. 53-56, 2005.
- [51] J. Furusho and K. Nakayama, “(Review) Rehabilitation System for Upper Extremities with 6-DOF “Serafy”,” J. of Robotics Society of Japan, Vol.24, No.2, pp. 186, 2006 (in Japanese).
- [52] K. Oda, Y. Ohyama, J. Furusho et al., “6-DOF Stand-Alone Rehabilitation System ”Robotherapist” and Its Applications to Stroke Patients,” Service Robotics and Mechatronics, pp. 91-94, 2009.
- [53] J. Furusho et al., “Development of Rehabilitation Systems for Upper Limbs EMUL, Robotherapist, and PLEMO,” Selected Papers from the Japanese Conf. on the Advancement of Assistive and Rehabilitation Technology (23rd JCAART), IOS Publishing, pp. 84-92, 2011.
- [54] J. Furusho and Y. Jin, “A 6-DOF Rehabilitation System for Upper Limbs “Robotherapist” and Other Rehabilitation Systems with High Safety, Rehabilitation Engineering,” I-Tech Education and Publishing, pp. 245-287, 2009.
- [55] J. Furusho and T. Morikawa, “(Review) Rehabilitation Support Systems Using ER Fluids and MR Fluids,” J. of the Japan Fluid Power System Society (JFPS), Vol.42, No.1, pp. 12-15, 2011 (in Japanese).
- [56] J. Furusho et al., “Next-Generation Actuators Leading Breakthrough,” Chapter 22, Compact MR Fluid Actuator for Human Friendly System Springer, pp. 329-336, 2010.
- [57] Y. Yamaguchi, J. Furusho et al., “Development of High-Performance MR Actuator and Its Application to 2-D Force Display,” Int. J. of Modern Physics B, Vol.19, No.7-9, pp. 1485-1491, 2005.
- [58] K. Oda, M. Haraguchi, and J. Furusho, “Development of Evaluation and Training System of Upper Limbs Movement for Cerebellar Ataxia Using VR Technology,” J. of Japanese Society for Medical Virtual Reality, Vol.12, No.1, pp. 27-38, 2014 (in Japanese).
- [59] J. Furusho, M. Sakaguchi, N. Takesue, and K. Koyanagi, “Development of ER Brake and its Application to Passive Force Display,” J. of Intelligent Material Systems and Structures, Vol.13, No.7/8, pp. 425-429, 2002.
- [60] J. Furusho, T. Ozawa et al., “Research and Development of Quasi-3D Rehabilitation System for Upper Limbs PLEMO-P3,” The Japanese J. of Rehabilitation Medicine, Vol.46, Supplement 2009, 1-4-21, 2009 (in Japanese).
- [61] T. Ozawa, J. Furusho et al., “Development of Rehabilitation System for Upper Limbs PLEMO-P3 System for Hemiplegic Subject,” J. of Robotics and Mechatronics, Vol.25, No.1, pp. 136-144, 2013, Full Translation from Trans. of JSME, Ser.C, Vol.76, No.762, pp. 323-330, 2010.
- [62] J. Furusho et al., “(Review) Development of Rehabilitation Systems for the Limbs Using Functional Fluids,” J. of Robotics and Mechatronics, Vol.26, No.3, pp. 302-309, 2014.
- [63] J. Furusho et al., “(Review) Non-Wearing Type Rehabilitation Systems for Upper Extremities,” J. of Japan Society of Mechanical Engineers, Vol.119, No.1166, pp. 19-21, 2016 (in Japanese).
- [64] J. Furusho, Y. Jin et al., “A Performance Evaluation Method of a Passive-Type Force Display and Rehabilitation System with Redundant Brakes,” Proc. of IEEE Int. Conf. on Rehabilitation Robotics (ICORR2009), pp. 950-955, 2009.
- [65] J. Furusho et al., “Development of the Passive-Type Force Display System “Neo-PLEMO”, Which Can Display the Opposite Resistance Force against Handle on the Arbitrary Link Posture,” Trans. JSME, Ser.C, Vol.78, No.786, pp. 187-198, 2012 (in Japanese).
- [66] J. Furusho, H. Kojima, and K. Yoshimura, “Development of Rehabilitation Systems for Upper-Limbs and Lower-Limbs Using Functional Fluids,” Asian Prosthetic and Orthotic Scientific Meeting 2012 (APOSM2012), Kobe, 2012.
- [67] J. Furusho et al., “Development of Next Generation Technologies for Human Motional Function and Locomotion, Part 2,” Chapter 6, Rehabilitation Robot for Upper Extremitie, pp. 124-141, NTS, 2014 (in Japanese).
- [68] J. Furusho, N. Takesue, and J. Noma, “4.3.3 MR Fluids (MRF) Actuators and Brakes and Their Applications for Nursing Care and Rehabilitation,” Life Support Robot, K. Terashima (Ed.), pp. 226-235, Jyohou Kikou, 2015 (in Japanese).
- [69] J. Furusho, H. Kojima, A. Tabata, S. Arai, Y. Akamatsu, and S. Tsutsui, “Research and Development of Rehabilitation Systems for Upper and Lower Extremities PLEMO Series at Furusho Laboratory of Fukui University of Technology,” Proc. of The 33rd Annual Conf. of the Robotics Society of Japan, 2J1-03, September, 2015 (in Japanese).
- [70] M. Simkins et al., “Unilateral and Bilateral Upper-Limb Movement Training for Stroke Survivors Afflicted by Chronic Hemiparesis,” Proc. of Int. Conf. on Rehabilitation Robotics (ICORR), Seattle, 2013.
- [71] J. Furusho, H. Kojima, and A. Tabata, “Development of Upper and Lower Limb Rehabilitation System PLEMO-BAT PLEMO-BLT for Stroke Patients Using Bilateral Limb Motion,” Proc. of 2015 JSME Conf. on Robotics and Mechatronics, 2A2-I03, 2015 (in Japanese).
- [72] J. Furusho and H. Ikeda, “(General Remarks) Rehabilitation, Nursing Care and Mechatronics,” J. of the Japanese Society of Mechanical Engineers (Social Issue on Rehabilitation Nursing Care and Mechatronics), Vol.119, No.1166, pp. 4-7, 2016 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.