Paper:
Improvement of EMC in MPPT Control of Photovoltaic System Using Auto-Tuning Adaptive Velocity Estimator
Tsuyoshi Ohba, Risa Matsuda, Haruo Suemitsu, and Takami Matsuo
Department of Architecture and Mechatronics, Oita University
700 Dannoharu, Oita 870-1192, Japan

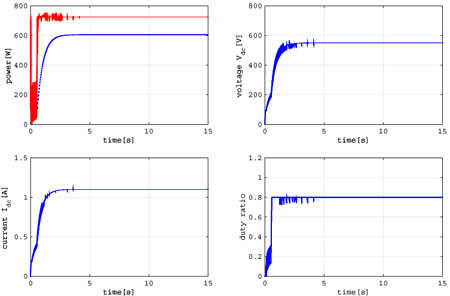 Proposed modified-IC method
Proposed modified-IC method- [1] D. P. Holm and M. E. Ropp, “Comparative Study of Maximum Power Point Tracking Algorithms,” Prog. Photovolt: Res. Appl., Vol.11, Issue 1, pp. 47-62, 2003.
- [2] M. A. S. Masoum, H. Dehbonet, and E. F. Fuchs, “Theoretical and experimental analyses of photovoltaic systems with voltage and current-based maximum power-point tracking,” IEEE Trans. on Energy Convers., Vol.17, No.4, pp. 514-522, 2002.
- [3] G. J. Yu, Y. S. Jung, J. Y. Choi, and G. S. Kim, “A novel two-mode MPPT control algorithm based on comparative study of existing algorithms,” Solar Energy, Vol.76, Issue 4, pp. 455-463, 2003.
- [4] W. Xiao, W. G. Dunford, P. R. Palmer, and A. Capel, “Regulation of Photovoltaic Voltage,” IEEE Trans. on Industrial Electronics, Vol.54, Issue 3, pp. 1365-1374, 2007.
- [5] R. Faranda and S. Leva, “Energy comparison of MPPT techniques for PV Systems,” WSEAS Trans. on Power Systems, Vol.6, Issue 3, pp. 446-455, 2008.
- [6] M. Calavia, J. M. Periée, J. F. Sanz, and J. Salláan, “Comparison of MPPT strategies for solar modules,” Proc. of Int. Conf. on Renewable Energies and Power Quality, 2010.
- [7] A. Tille and M. Montanari, “A low-noise estimator of angular speed and acceleration from shaft-encoder measurements,” ATKAAF, Vol.42, Issue 3-4, pp. 169-176, 2001.
- [8] P. R. Belanger, P. Dobrovolny, A. Helmy, and X. Zhang, “Estimation of angular velocity and acceleration from shaft-encoder measurements,” Int. J. Robot Res., Vol.17, Issue 11, pp. 1225-1233, 1998.
- [9] A. Levant, “Robust exact differentiation via sliding mode technique,” Automatica, Vol.34, Issue 3, pp. 379-384, 1998.
- [10] T. Emaru, K. Imagawa, Y. Hoshino, and Y. Kobayashi, “Velocity and Acceleration Estimation by a Nonlinear Filter Based on Sliding Mode and Application to Control System,” J. of Robotics and Mechatronics, Vol.21, Issue 5, pp. 590-596, 2009.
- [11] T. Matsuo, S. Wada, and H. Suemitsu, “Model-Based and Non-Model-Based Velocity Estimators for Mobile Robots,” Int. J. Innovating Computing, Information and Control, Vol.4, Issue 12, pp. 3123-3133, 2008.
- [12] T. Matsuo , K. Adachi, and H. Suemitsu, “Frequency Estimation with an LMI-based Adaptive Update Law,” Int. J. Int. J. of Advanced Mechatronic Systems, Vol.1, Issue 2, pp. 100-107, 2008.
- [13] T. Nomura, Y. Kitsuka, and T. Matsuo, “Nonmodel-Based Estimation for Velocity and Acceleration by Adaptive Identification Method,” IEEJ Trans. on Electrical and Electronic Engineering, Vol.5, Issue 3, pp. 372-374, 2010.
- [14] Y. Kitsuka, T. Nimiya, H. Suemitsu, and T. Matsuo, “Non-Model-Based Velocity and Acceleration Estimators for a Suspension System with Parallel Connection of a Hydraulic Actuator,” Proc. of 2010 IEEE Multi-Conference on Systems and Control, pp. 549-554, 2010.
- [15] Y. Kawakami, Y. Eguchi, T. Nimiya, H. Suemitsu, and T. Matsuo, “Velocity and Acceleration Estimation by Iterative Learning Observer and Performance Validation with MEMS-Based Inertial Sensors,” Int. J. of Advanced Mechatronic Systems, Vol.5, Issue 2, pp. 113-121, 2013.
- [16] M. Ezzeldin, P. P. J. van den Bosch, and R. Waarsing, “Improved Convergence of MRAC Design for Printing System,” Proc. of American Control Conf., pp. 3232-3237, 2009.
- [17] Y. Eguchi, T. Ohba, H. Suemitsu, and T. Matsuo, “Auto-Tuning Velocity Estimator by Using Adaptive Observer,” ICIC Express Letters, Vol.8, Issue 2, pp. 427-433, 2014.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.