Paper:
A Person Detection Method Using 3D Laser Scanner – Proposal of Efficient Grouping Method of Point Cloud Data –
Kento Hosaka and Tetsuo Tomizawa
The University of Electro-Communications
1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan

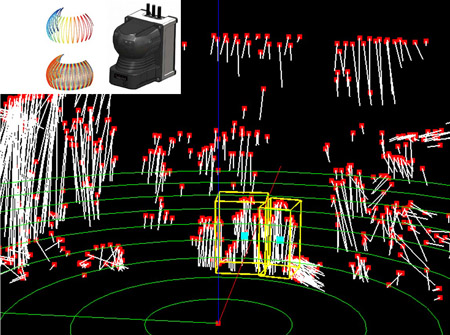 Our proposed method
Our proposed method- [1] T. Tomizawa, A. Ohya, and S. Yuta, “Remote Book Browsing System using a Mobile Manipulator,” Proc. of the 2003 IEEE Int. Conf. on Robotics & Automation, pp. 256-261, 2003.
- [2] S. Muramatsu, T. Tomizawa, S. Kudoh, and T. Suehiro, “Development of Intelligent Mobile Cart in a Crowded Environment – Robust Localization Technique with Unknown Objects –,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 204-213, 2014.
- [3] M. Sato, T. Tomizawa, S. Kudoh, and T. Suehiro, “Development of Danger Avoidance Assist System for Electric Cart,” J. of Robotics and Mechatronics, Vol.25, No.6, pp. 1011-1019, 2013.
- [4] K. Okawa, “Three Tiered Self-Localization of Two Position Estimation Using Three Dimensional Environment Map and Gyro-Odometry,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 196-203, 2014.
- [5] T. Yoshida, K. Irie, E. Koyanagi, and M. Tomono, “A Sensor Platform for Outdoor Navigation Using Gyro-assisted Odometry and Roundly-swinging 3D Laser Scanner,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1414-1420, 2010.
- [6] K. Yamauchi, N. Akai, R. Unai, K. Inoue, and K. Ozaki, “Person Detection Method Based on Color Layout in Real World Robot Challenge 2013,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 151-157, 2014.
- [7] J. Eguchi and K. Ozaki, “Development of the Autonomous Mobile Robot for Target-Searching in Urban Areas in the Tsukuba Challenge 2013,” J. of Robotics and Mechatronics, Vol.26, No.2, pp. 166-176, 2014.
- [8] J. Kikuchi, H. Date, S. Ohkawa, V. Labat, and Y. Takita, “Hierarchical approach using camera and LIDAR for searching people by autonomous mobile robot,” The 14th SICE System Integration Division Annual Conf., 1A2-5, 2013 (in Japanese).
- [9] M. Yoshida, A. Matsumoto, I. Takagi, T. Yamada, and A. Ohya, “Development of Mobile Robot for Searching Lost Children,” The 14th SICE System Integration Division Annual Conference, 1A3-4, 2013 (in Japanese). A. Carballo, A. Ohya, and S. Yuta, “Laser Reflection Intensity and Multi-Layered Laser Range Finders for People Detection,” IEEE Int. Symp. on Robot and Human Interactive Communication, pp. 379-384, 2010.
- [10] J. Kikuchi, H. Date, S. Ohkawa, Y. Takita, and K. Kobayashi, “Human Detection on Sitting State Using 3D LIDAR,” The 31st Conf. of the Robotics Society of Japan, 1E3-03, 2013 (in Japanese).
- [11] T. Yokota and Y. Kuroda, “Human Recognition by Extracting Shape Features from LIDAR Data,” JSME Conf. on Robotics and Mechatronics, 3P1-K04, 2014 (in Japanese).
- [12] C. Cortes and V. Vapnik, “Support vector networks,” Machine Learning, Vol.20, No.3, pp. 273-297, 1995.
- [13] K. Klasing, D. Wollherr, and M. Buss, “A Clustering Method for Efficient Segmentation of 3D Laser Data,” IEEE Int. Conf. on Robotics and Automation, pp. 4043-4048, 2008.
- [14] R. B. Rusu and S. Cousins, “3D is here: Point Cloud Library (PCL),” Proc. of the 2011 Int. Conf. on Robotics and Automation, 2011.
- [15] S. Akamatsu, N. Shimaji, and T. Tomizawa, “Development of a Person Counting System Using a 3D Laser Scanner,” Int. Conf. on Robotics and Biomimetics (ROBIO2014), pp. 1983-1988, 2014.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.