Paper:
Simulated and Experimental Comparisons of Slip and Torque Control Strategies for Regenerative Braking in Instances of Parametric Uncertainties
Maxime Boisvert, Philippe Micheau, and Didier Mammosser
Centre des Technologies Avancées, Université de Sherbrooke
1277 Du Lierre, Sherbrooke, Québec J1E0K4, Canada

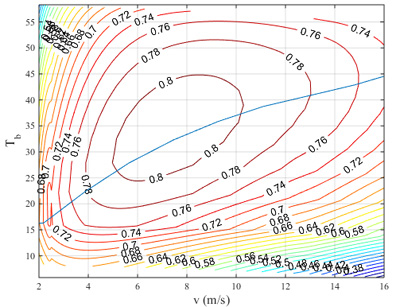
Slip efficiency map & control law
- [1] D. Mammosser, P. Micheau, and M. Boisvert, “Simulation of regenerative braking strategies on slippery roads for a 3-wheel hybrid vehicle,” EEVC Brussels, 2012.
- [2] M. Boisvert, D. Mammosser, and P. Micheau, “Comparison of two strategies for optimal regenerative braking, with their sensitivity to variations in mass, slope and road condition,” 7th IFAC Symposium on Advances in Automotive Control, 2013, Vol.7, Part 1, pp. 626-630, 2013.
- [3] A. A. Mukhitdinov, S. K. Ruzimov, and S. L. Eshkabilov, “Optimal Control Strategies for CVT of the HEV during regenerative process. Electric and Hybrid Vehicles,” ICEHV 06, IEEE Conf., 2006.
- [4] F. Wang and B. Zhuo, “Regenerative braking strategy for hybrid electric vehicles based on regenerative torque optimization control,” J. of Automobile Engineering, pp. 499-513, 2008.
- [5] H. Yeo and H. Kim, “Regenerative braking algorithm for a hybrid electric vehicle with CVT ratio control,” Institution of Mechanical Engineers, Part D: J. of Automobile Engineering, Vol.220, pp. 1589-1600, 2006.
- [6] G. Rill, “Vehicle Dynamics,” University of Applied Sciences in Regensburg, Germany, 2006.
- [7] M. Burckhardt, “Radschlupf Regelsysteme,” Vogelverlag, 1993.
- [8] D. Hu and H. Zong, “Research on Information Fusion Algorithm for Vehicle Speed information and Road Adhesion Property Estimation,” Int. Conf. on Mechatronics and Automation, pp. 3229-3234, 2009.
- [9] T. D. Gillespie, “Fundamentals of Vehicle Dynamics,” Society of Automotive Engineers, 1992.
- [10] U. Kiencke and L. Nielsen, “Automotive Control System,” Springer-Verlag, 2005.
- [11] N. Denis, M. Dubois, and K. A. Gil, “Model development and performance estimation of a three-wheel plug-in hybrid electric vehicle,” EV2012VÉ, 2012.
- [12] J.-J. E. Slotine and W. Li, “Applied Nonlinear Control,” Prendice Hall, 1991.
- [13] J.-P. Brossard, “Dynamique du Freinage,” Presse polytechniques et universitaires romandes, 2009.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.