Paper:
Landing Motion of a Legged Robot with Minimization of Impact Force and Joint Torque
Xianglong Wan, Takateru Urakubo, and Yukio Tada
Department of Systems Science, Graduate School of System Informatics, Kobe University
1-1 Rokkodai, Nada-ku, Kobe 657-8501, Japan

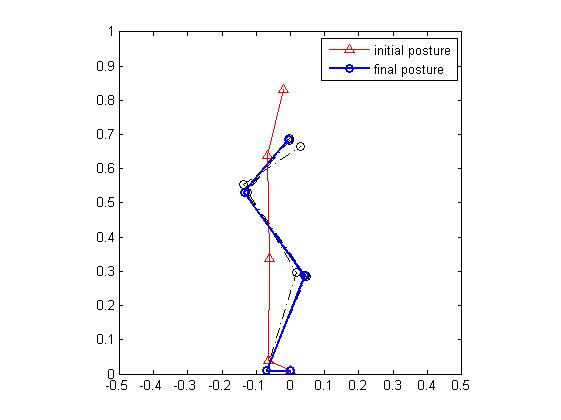 Optimal motion of a legged robot
Optimal motion of a legged robot- [1] K. Hirai, M. Hirose, Y. Haikawa, and T. Takenaka, “The development of Honda humanoid robot,” Proc. of 1998 IEEE Int. Conf. on Robotics and Automation, Vol.2, pp. 1321-1326, 1998.
- [2] T. Kanda, H. Ishiguro, M. Imai, and T. Ono, “Body Movement Analysis of Human-Robot Interaction,” Int. Joint Conf. on Artificial Intelligence, pp. 177-182, 2003.
- [3] J. Urata, Y. Nakanishi, K. Okada, and M. Inaba, “Design of high torque and high speed leg module for high power humanoid,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 4497-4502, 2010.
- [4] R. Niiyama, A. Nagakubo, and Y. Kuniyoshi, “Mowgli: A Bipedal Jumping and Landing Robot with an Artificial Musculoskeletal System,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 2546-2551, 2007.
- [5] R. Niiyama, S. Nishikawa, and Y. Kuniyoshi, “Biomechanical Approach to Open-Loop Bipedal Running with a Musculoskeletal Athlete Robot,” Advanced Robotics, Vol.26, No.3-4, pp. 383-398, 2012.
- [6] K. Arikawa and T. Mita, “Design of multi-DOF jumping robot,” Proc. of IEEE Int. Conf. on Robotics and Automation, Vol.4, pp. 3992-3997, 2002.
- [7] S. Hyon and T. Mita, “Development of a biologically inspired hopping robot -- Kenken,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 3984-3991, 2002.
- [8] S. Sung and Y. Youm, “Landing Motion Control of Articulated Legged Robot,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 3230-3236, 2007.
- [9] I. D. Walker, “The use of kinematic redundancy in reducing impact and contact effects in manipulation,” Proc. of IEEE Int. Conf. on Robotics and Automation, Vol.1, pp. 434-439, 1990.
- [10] I. D. Walker, “Impact configurations and measures for kinematically redundant and multiple robot systems,” IEEE Trans. on Robotics and Automation, Vol.10, pp. 670-683, 1994.
- [11] J. H. Park and H. Chung, “Impedance Control and Modulation for Stable Footing in Locomotion of Biped Robots,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Vol.3, pp. 1786-1791, 1999.
- [12] J. Mizrahi, E. Kimmel, O. Verbitsky, and E. Isakov, “Constant and Variable Stiffness and Damping of the Leg Joints in Human Hopping,” J. of Biomechanical Engineering, Vol.125, pp. 507-514, 2003.
- [13] C. T. Farley and D. C. Morgenroth, “Leg stiffness primarily depends on ankle stiffness during human hopping,” J. of Biomechanical Engineering, Vol.32, pp. 267-273, 1999.
- [14] T. Urakubo, T. Mashimo, and T. Kanade, “Efficient pulling motion of a two-link robot arm near singular configuration,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1372-1377, 2010.
- [15] T. Urakubo, T. Mashimo, and T. Kanade, “Optimal placement of a two-link manipulator for door opening,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1446-1451, 2009.
- [16] T. Urakubo, H. Yoshioka, T. Mashimo, and X. Wan, “Experimental Study on Efficient Use of Singular Configuration in Pulling Heavy Objects with Two-link Robot Arm,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 4582-4587, 2014.
- [17] S. Nakaoka, S. Hattori, F. Kanehiro, S. Kajita, and H. Hirukawa, “Constraint-based dynamics simulator for humanoid robots with shock absorbing mechanisms,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3641-3647, 2007.
- [18] J. Yamaguchi, A. Takanishi, and I. Kato, “Experimental development of a foot mechanism with shock absorbing material for acquisition of landing surface position information and stabilization of dynamic biped walking,” Proc. of IEEE Int. Conf. on Robotics and Automation, Vol.3, pp. 2892-2899, 1995.
- [19] V. Kumar and J. F. Gardner, “Kinematics of Redundantly Actuated Closed Chains,” IEEE Trans. on Robotics and Automation, Vol.6, No.2, pp. 269-274, 1990.
- [20] K. L. Brown, “Design and Analysis of Robots that Perform Dynamic Tasks Using Internal Body Motion,” Ph.D. Thesis, MIT, 1994.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.