Research Paper:
Design and Implementation of a YOLO-Based Visual Positioning System for Train Static Weighing
Zhenmin Chen*1,*2, Lingfeng Zuo*1,*3,*4, Yiheng Chen*1,*3,*4, Jun Chen*1,*3,*4, Jundong Wu*1,*3,*4,†
 , and Yawu Wang*1,*3,*4
, and Yawu Wang*1,*3,*4
*1School of Automation, China University of Geosciences (Wuhan)
No.388 Lumo Road, Hongshan, Wuhan, Hubei 430074, China
*2Hunan Valin Lianyuan Iron & Steel Co., Ltd.
Huangnitang, Loudi, Hunan 417009, China
*3Hubei Key Laboratory of Advanced Control and Intelligent Automation for Complex Systems
No.388 Lumo Road, Hongshan, Wuhan, Hubei 430074, China
*4Engineering Research Center of Intelligent Technology for Geo-Exploration, Ministry of Education
No.388 Lumo Road, Hongshan, Wuhan, Hubei 430074, China
†Corresponding author

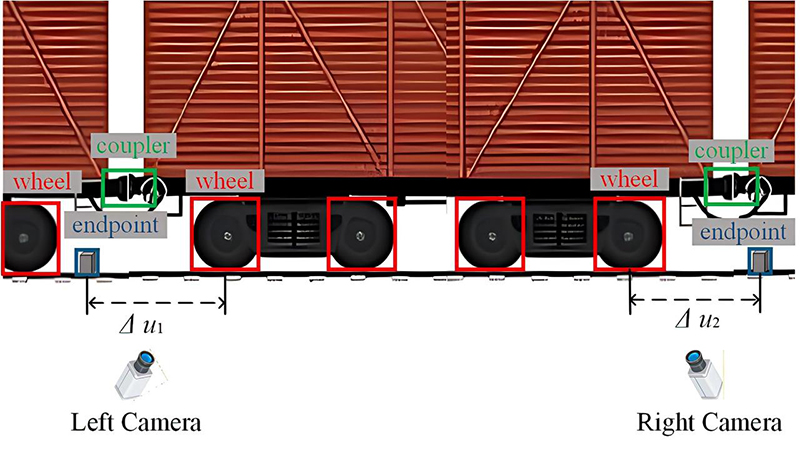
Static weighting process is a critical component of industrial logistics, yet the prevailing approach to train positioning relies on manual visual guidance. This method is suboptimal, resulting in low efficiency and safety risks in harsh environments. To address these limitations, this study proposes a computer-vision-based positioning system for train static weighing. Industrial cameras are utilized to capture real-time images at both ends of the weighbridge, and a lightweight YOLO model is employed to detect couplers, wheels, and endpoints with an accuracy rate exceeding 98%. The process of camera calibration and the implementation of a pixel-world mapping model, founded on the principle of perspective transformation, is instrumental in the computation of the carriage’s actual positional deviation, in turn, serving as a critical guide for the execution of precise parking maneuvers. Empirical evidence from practical deployment indicates that the system enhances weighing efficiency by 75%, while concurrently facilitating fully unmanned, safer operations on site.
Vision-based train positioning
- [1] Z. Chen, Q. Wang, K. Yang, T. Yu, J. Yao, Y. Liu, P. Wang, and Q. He, “Deep learning for the detection and recognition of rail defects in ultrasound B-scan images,” Transportation Research Record, Vol.2675, No.11, pp. 888-901, 2021. https://doi.org/10.1177/03611981211021547
- [2] Y. Tang, and Y. Qian, “A boiler heating surface overtemperature high-speed railway track components inspection framework based on YOLOv8 with high-performance model deployment,” High-speed Railway, Vol.2, No.1, pp. 42-50, 2024. https://doi.org/10.1016/j.hspr.2024.02.001
- [3] V. Skrickij, D. Shi, S. Ricci, L. Rizzetto, and G. Bureika, “Visual measurement system for wheel-rail lateral position evaluation,” Sensors, Vol.21, No.4, Article No.1297, 2021. https://doi.org/10.3390/s21041297
- [4] J. Hu, P. Qiao, H. Lv, L. Yang, A. Ouyang, Y. He, and Y. Liu, “High speed railway fastener defect detection by Using improved YOLOx-nano model,” Sensors, Vol.22, No.21, Article No.8399, 2022. https://doi.org/10.3390/s22218399
- [5] J. Wu, “Traffic sign detection in autonomous driving: Optimization choices for YOLO models,” Proc. of the 5th Int. Conf. on Advances in Electrical Engineering and Computer Applications, 2024. https://doi.org/10.1109/AEECA62331.2024.00097
- [6] S. Li and H. Yoon, “Vehicle localization in 3D world coordinates using single camera at traffic intersection,” Sensors, Vol.23, No.7, Article No.3661, 2023. https://doi.org/10.3390/s23073661
- [7] X. Li, Q. Wang, X. Yang, K. Wang, and H. Zhang, “Track fastener defect detection model based on improved YOLOv5s,” Sensors, Vol.23, No.14, Article No.6457, 2023. https://doi.org/10.3390/s23146457
- [8] L. Kang, Z. Lu, L. Meng, and Z. Gao, “Multi-source information fusion deep self-attention reinforcement learning framework for multi-label compound fault recognition,” Expert Systems with Applications, Vol.237, Part B, 2024. https://doi.org/10.1016/j.mechmachtheory.2022.105090
- [9] Y. Huang, Q. Chai, and W. Wang, “Modified YOLO network for symptom detection in panoramic oral roentgenogram,” Proc. of the 43rd Chinese Control Conf., Kun Ming, 2024. https://doi.org/10.23919/CCC63176.2024.10661828
- [10] S. Dadjouy and H. Sajedi, “Gallbladder cancer detection in ultrasound images based on YOLO and faster R-CNN,” Proc. of the 10th Int. Conf. on Artificial Intelligence and Robotics, 2024. https://doi.org/10.1109/QICAR61538.2024.10496645
- [11] Z. Zhai, H. Sun, J. Zhao, Z. Dong, S. He, and H. Zhao, “Displacement generating module based end-to-end micro-expression recognition network,” 2021 IEEE Int. Conf. on Systems, Man, and Cybernetics, 2021. https://doi.org/10.1109/SMC52423.2021.9658691
- [12] D. Yang, M. Solihin, L. Ardiyanto, Y. Zhao, W. Li, B. Cai, and C. Chen, “A streamlined approach for intelligent ship object detection using EL-YOLO algorithm,” Scientific Reports, Vol.14, pp. 15254-15270, 2024. https://doi.org/10.1038/s41598-024-64225-y
- [13] Y. Luo, X. Wang, Y. Liao, Q. Fu, C. Shu, Y. Wu, and Y. He, “A review of homography estimation: Advances and Challenges,” Electronics, Vol.12, No.24, Article No.4977, 2023. https://doi.org/10.3390/electronics12244977
- [14] S. Ranjan, F. Marco, Q. Rizwan, B. Chetan, N. Upesh, and P. Alwin, “YOLO advances to its genesis: A decadal and comprehensive review of the You Only Look Once (YOLO) series,” Artificial Intelligence Review, Vol.58, Article No.274, 2025. https://doi.org/10.1007/s10462-025-11253-3
- [15] M. Lei, S. Li, Y. Wu, H. Hu, Y. Zhou, X. Zheng, G. Ding, S. Du, Z. Wu, and Y. Gao, “YOLOv13: Real-time object detection with hypergraph-enhanced adaptive visual perception,” arXiv:2506.17733, 2025. https://doi.org/10.48550/arXiv.2506.17733
- [16] Z. Zhang, “A flexible new technique for camera calibration,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.22, No.11, pp. 1330-1334, 2000. https://doi.org/10.1109/34.888718
- [17] Y. Feng, J. Huang, S. Du, S. Ying, J.-H. Yong, Y. Li, G. Ding, R. Ji, and Y. Gao, “Hyper-YOLO: When visual object detection meets hypergraph computation,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.47, No.4, pp. 2388-2401, 2025. https://doi.org/10.1109/TPAMI.2024.3524377
- [18] S. Ruan, C. Zhan, B. Liu, and Q. Wan, “Surface defect detection on bolt surface using a real-time fine-tuned YOLOv6 model,” J. of Big Data, Vol.12, No.1, pp. 226-252, 2025. https://doi.org/10.1186/s40537-025-01226-2
- [19] X. Yang, Y. Chen, L. Wu, and J. Zhao, “YOLO-VMTC: Enhancing steel surface defect detection with a lightweight and context-aware deep learning approach,” J. of Electrical Systems, Vol.20, No.4, pp. 6096-6108, 2024.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.