Research Paper:
Tracking Control Method of Multi Motor Actuator Saturation Based on Total Amount Consistency
Lin Jia
 , Junming Zhang, Changfan Zhang, and Jing He†
, Junming Zhang, Changfan Zhang, and Jing He†
College of Railway Transportation, Hunan University of Technology
89 Taishan Xi Road, Tianyuan District, Zhuzhou, Hunan 412007, China
†Corresponding author

In collaborative control of multi motors for heavy-duty locomotives, the output value of the motor frequently exceeds its maximum allowable value during power redistribution. This results in a saturated motor owing to the power redundancy of each wheel set of the train. In this study, an algorithm for the tracking control of a consistent total amount of the extended observer through anti-saturation is proposed. First, mathematical models of multi-motor traction systems are developed. The system includes uncertain parameter perturbations and external perturbations. Second, a new type of extended sliding mode observer (ESMO) is designed to reduce the influence of the tracking effect on the input saturation of the system. Subsequently, for collaborative control of multi motors in heavy-duty locomotives, a new scheme for dynamic and auxiliary anti-saturation compensation (anti-windup) is established. The perturbation observation results and the systems’ auxiliary status are respectively input into the sliding mode controller (SMC). A traction total-amount coordinated tracking control (TACTC) of multi motors is achieved to ensure consistency of the system’s total output torque and the given traction characteristic curve. Finally, simulations and tests are performed on the motor actuators to demonstrate a good control effect.
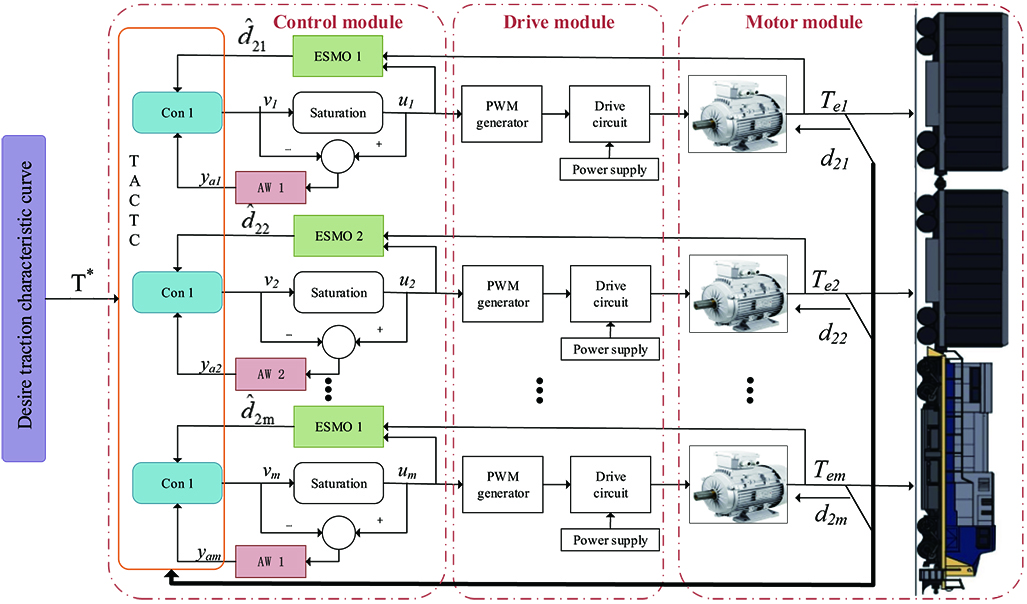
System framework of the proposed method
- [1] M. S. Reineh, S. S. Kia, and F. Jabbari, “New anti-windup structure for magnitude and rate limited inputs and peak-bounded disturbances,” Automatica, Vol.97, pp. 301-305, 2018. https://doi.org/10.1016/j.automatica.2018.08.016
- [2] T. Li et al., “Static anti-windup compensator for nonlinear systems with both state and input time-varying delays,” J. of the Franklin Institute, Vol.357, No.2, pp. 863-886, 2020. https://doi.org/10.1016/j.jfranklin.2019.10.009
- [3] F. Wu, Z. Lin, and Q. Zheng, “Output feedback stabilization of linear systems with actuator saturation,” IEEE Trans. on Automatic Control, Vol.52, No.1, pp. 122-128, 2007. https://doi.org/10.1109/TAC.2006.886498
- [4] S. Tarbouriech and M. Turner, “Anti-windup design: An overview of some recent advances and open problems,” IET Control Theory & Applications, Vol.3, No.1, pp. 1-19, 2009. https://doi.org/10.1049/iet-cta:20070435
- [5] X. Wu and Z. Lin, “On immediate, delayed and anticipatory activation of anti-windup mechanism: Static anti-windup case,” IEEE Trans. on Automatic Control, Vol.57, No.3, pp. 771-777, 2012. https://doi.org/10.1109/TAC.2011.2166319
- [6] X. Yao et al., “Static anti-windup design for nonlinear Markovian jump systems with multiple disturbances,” Information Sciences, Vols.418-419, pp. 169-183, 2017. https://doi.org/10.1016/j.ins.2017.08.006
- [7] A. Akram et al., “Dynamic anti-windup compensation of nonlinear time-delay systems using LPV approach,” Nonlinear Dynamics, Vol.90, No.1, pp. 513-533, 2017. https://doi.org/10.1007/s11071-017-3678-8
- [8] C. Zhang et al., “Total-amount synchronous control based on terminal sliding-mode control,” IEEE Access, Vol.5, pp. 5436-5444, 2017. https://doi.org/10.1109/ACCESS.2017.2688518
- [9] C. Zhang et al., “Consensus-based total-amount cooperative tracking control for multi-motor locomotive traction system,” J. of the Franklin Institute, Vol.356, No.2, pp. 819-834, 2019. https://doi.org/10.1016/j.jfranklin.2017.11.025
- [10] J. He et al., “Demagnetization fault detection in permanent magnet synchronous motors based on sliding observer,” J. of Nonlinear Sciences and Applications, Vol.9, No.5, pp. 2039-2048, 2016. http://doi.org/10.22436/jnsa.009.05.10
- [11] W.-F. Xie, “Sliding-mode-observer-based adaptive control for servo actuator with friction,” IEEE Trans. on Industrial Electronics, Vol.54, No.3, pp. 1517-1527, 2007. https://doi.org/10.1109/TIE.2007.894718
- [12] Z. Qiao et al., “New sliding-mode observer for position sensorless control of permanent-magnet synchronous motor,” IEEE Trans. on Industrial Electronics, Vol.60, No.2, pp. 710-719, 2013. https://doi.org/10.1109/TIE.2012.2206359
- [13] J. Zhang, P. Shi, and W. Lin, “Extended sliding mode observer based control for Markovian jump linear systems with disturbances,” Automatica, Vol.70, pp. 140-147, 2016. https://doi.org/10.1016/j.automatica.2016.03.020
- [14] X. Zhang and Z. Li, “Sliding-mode observer-based mechanical parameter estimation for permanent magnet synchronous motor,” IEEE Trans. on Power Electronics, Vol.31, No.8, pp. 5732-5745, 2016. https://doi.org/10.1109/TPEL.2015.2495183
- [15] H.-W. Kim et al., “Parameter estimation of SPMSM using adaptive filter and extended sliding-mode observer,” 2019 IEEE 15th Int. Conf. on Control and Automation (ICCA), pp. 702-707, 2019. https://doi.org/10.1109/ICCA.2019.8899959
- [16] C. Zhang et al., “Robust fault-tolerant predictive current control for permanent magnet synchronous motors considering demagnetization fault,” IEEE Trans. on Industrial Electronics, Vol.65, No.7, pp. 5324-5334, 2018. https://doi.org/10.1109/TIE.2017.2774758
- [17] K. Zhao et al., “Robust model-free nonsingular terminal sliding mode control for PMSM demagnetization fault,” IEEE Access, Vol.7, pp. 15737-15748, 2019. https://doi.org/10.1109/ACCESS.2019.2895512
- [18] V. I. Utkin, “Sliding modes in control and optimization,” Springer, 1992.
- [19] A. T. Woldegiorgis et al., “Extended sliding mode disturbance observer-based sensorless control of IPMSM for medium and high-speed range considering railway application,” IEEE Access, Vol.7, pp. 175302-175312, 2019. https://doi.org/10.1109/ACCESS.2019.2957274
- [20] W. He, Y. Dong, and C. Sun, “Adaptive neural impedance control of a robotic manipulator with input saturation,” IEEE Trans. on Systems, Man, and Cybernetics: Systems, Vol.46, No.3, pp. 334-344, 2016. https://doi.org/10.1109/TSMC.2015.2429555
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.