Paper:
A Hybrid Path Planning and Formation Control Strategy of Multi-Robots in a Dynamic Environment
Meng Zhou, Zihao Wang, Jing Wang, and Zhe Dong
School of Electrical and Control Engineering, North China University of Technology
No.5 Jinyuanzhuang Road, Shijingshan District, Beijing 100144, China

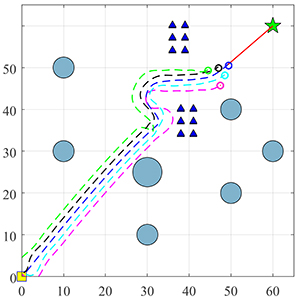
This paper proposes a hybrid path planning and formation control strategy for multi-robots in a dynamic environment. Under a leader-follower formation structure, the followers can track the motion of one leader after the leader’s path is determined. First, a hybrid path planning strategy that contains global path planning and local path planning of the leader is investigated, in which an improved hybrid grey wolf optimizer with whale optimizer algorithm (GWO-WOA) is designed for the global path planning in a given map, meanwhile, a dynamic window approach (DWA) is fused for the local path planning to avoid dynamic obstacles. Then, a leader-follower formation control algorithm is proposed for multiple mobile robots. The followers are controlled to track their corresponding virtual robots which are generated according to the leader’s position and the formation. Finally, simulation experiments are given to demonstrate the feasibility and effectiveness of the proposed algorithm in different environments.
Formation motion planning
- [1] Y. Zhao, Y. Hao, Q. Wang et al., “A rigid formation control approach for multi-agent systems with curvature constraints,” IEEE Trans. on Circuits and Systems II: Express Briefs, Vol.68, Issue 11, pp. 3431-3435, 2021.
- [2] R. Ringbäck, J. Wei, E. S. Erstorp et al., “Multi-agent formation tracking for autonomous surface vehicles,” IEEE Trans. on Control Systems Technology, Vol.29, Issue 6, pp. 2287-2298, 2020.
- [3] Z. Gao and G. Guo, “Velocity free leader-follower formation control for autonomous underwater vehicles with line-of-sight range and angle constraints,” Information Sciences, Vol.486, pp. 359-378, 2019.
- [4] L. Yan, T. Stouraitis, and S. Vijayakumar, “Decentralized ability-aware adaptive control for multi-robot collaborative manipulation,” IEEE Robotics and Automation Letters, Vol.6, Issue 2, pp. 2311-2318, 2021.
- [5] Y. Rizk, M. Awad, and E. W. Tunstel, “Cooperative heterogeneous multi-robot systems: A survey,” ACM Computing Surveys, Vol.52, No.2, Article No.29, 2020.
- [6] S.-L. Dai, S. He, H. Cai et al., “Adaptive leader-follower formation control of underactuated surface vehicles with guaranteed performance,” IEEE Trans. on Systems, Man, and Cybernetics: Systems, Vol.52, Issue 3, pp. 1997-2008, 2020.
- [7] D. Zhou, Z. Wang, and M. Schwager, “Agile coordination and assistive collision avoidance for quadrotor swarms using virtual structures,” IEEE Trans. on Robotics, Vol.34, Issue 4, pp. 916-923, 2018.
- [8] Y. Liu and R. Bucknall, “A survey of formation control and motion planning of multiple unmanned vehicles,” Robotica, Vol.36, Issue 7, pp. 1019-1047, 2018.
- [9] K. P. Cheng, R. E. Mohan, N. H. K. Nhan et al., “Graph theory-based approach to accomplish complete coverage path planning tasks for reconfigurable robots,” IEEE Access, Vol.7, pp. 94642-94657, 2019.
- [10] L. Chen, J. Mei, C. Li et al., “Distributed leader-follower affine formation maneuver control for high-order multiagent systems,” IEEE Trans. on Automatic Control, Vol.65, Issue 11, pp. 4941-4948, 2020.
- [11] B. S. Park and S. J. Yoo, “Connectivity-maintaining obstacle avoidance approach for leader-follower formation tracking of uncertain multiple nonholonomic mobile robots,” Expert Systems with Applications, Vol.171, Article No.114589, 2021.
- [12] J. Lin, Z. Miao, H. Zhong et al., “Adaptive image-based leader-follower formation control of mobile robots with visibility constraints,” IEEE Trans. on Industrial Electronics, Vol.68, Issue 7, pp. 6010-6019, 2020.
- [13] C. Cheng, Q. Sha, B. He et al., “Path planning and obstacle avoidance for AUV: A review,” Ocean Engineering, Vol.235, Article No.109355, 2021.
- [14] E. G. Tsardoulias, K. Iliakopoulou, A. Kargakos et al., “A review of global path planning methods for occupancy grid maps regardless of obstacle density,” J. of Intelligent & Robotic Systems, Vol.84, pp. 829-858, 2016.
- [15] N. Buniyamin, W. A. J. W. Ngah, N. Sariff et al., “A simple local path planning algorithm for autonomous mobile robots,” Int. J. of Systems Applications, Engineering & Development, Vol.5, Issue 2, pp. 151-159, 2011.
- [16] S. K. Debnath, R. Omar, S. Bagchi et al., “Different cell decomposition path planning methods for unmanned air vehicles – A review,” Proc. of the 11th National Technical Seminar on Unmanned System Technology, pp. 99-111, 2021.
- [17] H. Niu, A. Savvaris, A. Tsourdos et al., “Voronoi-visibility roadmap-based path planning algorithm for unmanned surface vehicles,” J. of Navigation, Vol.72, Issue 4, pp. 850-874, 2019.
- [18] P. Wang, S. Gao, L. Li et al., “Obstacle avoidance path planning design for autonomous driving vehicles based on an improved artificial potential field algorithm,” Energies, Vol.12, Issue 12, Article No.2342, 2019.
- [19] J. Wang, W. Chi, C. Li et al., “Neural RRT*: Learning-based optimal path planning,” IEEE Trans. on Automation Science and Engineering, Vol.17, Issue 4, pp. 1748-1758, 2020.
- [20] W. Gao, Q. Tang, B. Ye et al., “An enhanced heuristic ant colony optimization for mobile robot path planning,” Soft Computing, Vol.24, pp. 6139-6150, 2020.
- [21] T. Qiuyun, S. Hongyan, G. Hengwei et al., “Improved particle swarm optimization algorithm for AGV path planning,” IEEE Access, Vol.9, pp. 33522-33531, 2021.
- [22] M. Panda, B. Das, and B. B. Pati, “Global path planning for multiple AUVs using GWO,” Archives of Control Sciences, Vol.30, No.1, pp. 77-100, 2020.
- [23] Z. Yan, J. Zhang, Z. Yang et al., “Two-dimensional optimal path planning for autonomous underwater vehicle using a whale optimization algorithm,” Concurrency and Computation: Practice and Experience, Vol.33, Issue 9, Article No.e6140, 2021.
- [24] C. Lu, L. Gao, X. Li et al., “Chaotic-based grey wolf optimizer for numerical and engineering optimization problems,” Memetic Computing, Vol.12, pp. 371-398, 2020.
- [25] R. O. Lavrenov, E. A. Magid, F. Matsuno et al., “Development and implementation of spline-based path planning algorithm in ROS/Gazebo environment,” Tr. SPIIRAN, Vol.18, Issue 1, pp. 57-84, 2019.
- [26] L. Chang, L. Shan, C. Jiang et al., “Reinforcement based mobile robot path planning with improved dynamic window approach in unknown environment,” Autonomous Robots, Vol.45, pp. 51-76, 2021.
- [27] L. Feng, M. Zhou, and B. Hu, “A hybrid motion planning algorithm for multi-robot formation in a dynamic environment,” IEEE 16th Int. Conf. on Automation Science and Engineering (CASE), pp. 343-348, 2020.
- [28] Z.-M. Gao and J. Zhao, “An improved grey wolf optimization algorithm with variable weights,” Computational Intelligence and Neuroscience, Article No.2981282, doi: https://doi.org/10.1155/2019/2981282, 2019.
- [29] W. Deng, R. Yao, H. Zhao et al., “A novel intelligent diagnosis method using optimal LS-SVM with improved PSO algorithm,” Soft Computing, Vol.23, pp. 2445-2462, 2019.
- [30] H. Mohammed and T. Rashid, “A novel hybrid GWO with WOA for global numerical optimization and solving pressure vessel design,” Neural Computing and Applications, Vol.32, pp. 14701-14718, 2020.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.