Paper:
Combining Input Shaping and Adaptive Model-Following Control for Vibration Suppression
Jinhua She*,**,***, Lulu Wu*,**, and Zhen-Tao Liu*,**,†
*School of Automation, China University of Geosciences
No.388 Lumo Road, Wuhan, Hubei 430074, China
**Hubei Key Laboratory of Advanced Control and Intelligent Automation for Complex Systems
No.388 Lumo Road, Wuhan, Hubei 430074, China
***School of Engineering, Tokyo University of Technology
1404-1 Katakura, Hachioji, Tokyo 192-0982, Japan
†Corresponding author

Vibration suppression in servo systems is significant in high-precision motion control. This paper describes a vibration-suppression method based on input shaping and adaptive model-following control. First, a zero vibration input shaper is used to suppress the vibration caused by an elastic load to obtain an ideal position output. Then, a configuration that combines input shaping with model-following control is developed to suppress the vibration caused by changes of system parameters. Finally, analyzing the percentage residual vibration reveals that it is effective to employ the sum of squared position error as a criterion. Additionally, a golden-section search is used to adjust the parameters of a compensator in an online fashion to adapt to the changes in the vibration frequency. A comparison with other input shaper methods shows the effectiveness and superiority of the developed method.
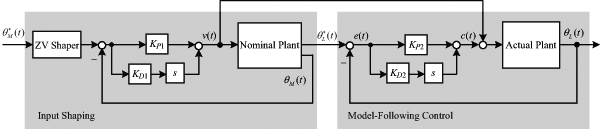
Vibration-suppression structure
- [1] F. Liu, F. Gao, L. Liu, and D. N. Sidorov, “IPMSM speed and current controller design for electric vehicles based on explicit MPC,” J. Adv. Comput. Intell. Intell. Inform., Vol.23, No.6, pp. 1019-1026, 2019.
- [2] L. Biagiotti, C. Melchiorri, and L. Moriello, “Optimal trajectories for vibration reduction based on exponential filters,” IEEE Trans. on Control Systems Technology, Vol.24, No.2, pp. 609-622, 2016.
- [3] M. Cole and T. Wongratanaphisan, “A direct method of adaptive fir input shaping for motion control with zero residual vibration,” IEEE/ASME Trans. on Mechatronics, Vol.18, No.1, pp. 316-327, 2013.
- [4] W. Sun, H. Gao, and B. Yao, “Adaptive robust vibration control of full-car active suspensions with electrohydraulic actuators,” IEEE Trans. on Control Systems Technology, Vol.21, No.6, pp. 2417-2422, 2013.
- [5] S. Wang, J. Zhao, and J. Wang, “Open-closed-loop iterative learning control for hydraulically driven fatigue test machine of insulators,” J. of Vibration and Control, Vol.21, No.12, pp. 2291-2305, 2015.
- [6] S. Katsura and K. Ohnishi, “Absolute stabilization of multimass resonant system by phase-lead compensator based on disturbance observer,” IEEE Trans. on Industrial Electronics, Vol.54, No.6, pp. 3389-3396, 2008.
- [7] W. He and S. Ge, “Vibration control of a nonuniform wind turbine tower via disturbance observer,” IEEE/ASME Trans. on mechatronics, Vol.20, No.1, pp. 237-244, 2014.
- [8] Q. Ngo and K. Hong, “Adaptive sliding mode control of container cranes,” IET Control Theory & Applications, Vol.6, No.5, pp. 662-668, 2012.
- [9] Q. Ngo and K. Hong, “Sliding-mode antisway control of an offshore container crane,” IEEE/ASME Trans. on Mechatronics, Vol.17, No.2, pp. 201-209, 2012.
- [10] J. Lou, Y. Wei, G. Li, Y. Yang, and F. Xie, “Optimal trajectory planning and linear velocity feedback control of a flexible piezoelectric manipulator for vibration suppression,” Shock and Vibration, Vol.2015, Article No.952708, 2015.
- [11] Z. Li and J. Zhao, “Research on the method of robot arm trajectory planning under chaos control,” J. Adv. Comput. Intell. Intell. Inform., Vol.23, No.2, pp. 345-350, 2019.
- [12] W. He, Y. Ouyang, and J. Hong, “Vibration control of a flexible robotic manipulator in the presence of input deadzone,” IEEE Trans. on Industrial Informatics, Vol.13, No.1, pp. 48-59, 2017.
- [13] V. La and K. Nguyen, “Combination of input shaping and radial spring-damper to reduce tridirectional vibration of crane payload,” Mechanical Systems and Signal Processing, Vol.116, pp. 310-321, 2019.
- [14] O. Smith, “Posicast control of damped oscillatory systems,” Proc. of the IRE, Vol.45, No.9, pp. 1249-1255, 1957.
- [15] N. Singer and W. Seering, “Preshaping command inputs to reduce system vibration,” J. of Dynamic Systems, Measurement, and Control, Vol.112, No.1, pp. 76-82, 1990.
- [16] W. Singhose, “Command shaping for flexible systems: A review of the first 50 years,” Int. J. of Precision Engineering and Manufacturing, Vol.10, No.4, pp. 153-168, 2009.
- [17] C. Liu and Y. Chen, “Combined s-curve feedrate profiling and input shaping for glass substrate transfer robot vibration suppression,” Industrial Robot: An Int. J., Vol.45, No.4, pp. 549-560, 2018.
- [18] J. Kim and E. Croft, “Preshaping input trajectories of industrial robots for vibration suppression,” Robotics and Computer-Integrated Manufacturing, Vol.54, pp. 35-44, 2018.
- [19] J. Shan, H. Liu, and D. Sun, “Modified input shaping for a rotating single-link flexible manipulator,” J. of Sound and Vibration, Vol.285, Nos.1-2, pp. 187-207, 2005.
- [20] A. Tzes and S. Yurkovich, “An adaptive input shaping control scheme for vibration suppression in slewing flexible structures,” IEEE Trans. on Control Systems Technology, Vol.1, No.2, pp. 114-121, 1993.
- [21] E. Pereira, J. Trapero, I Díaz, and V. Feliu, “Adaptive input shaping for manoeuvring flexible structures using an algebraic identification technique,” Automatica, Vol.45, No.4, pp. 1046-1051, 2009.
- [22] T. Chen and J. Shan, “Fixed-time consensus control of multiagent systems using input shaping,” IEEE Trans. on Industrial Electronics, Vol.66, No.9, pp. 7433-7441, 2018.
- [23] M. Cole, “A discrete-time approach to impulse-based adaptive input shaping for motion control without residual vibration,” Automatica, Vol.47, No.11, pp. 2504-2510, 2011.
- [24] C. Adams, J. Potter, and W. Singhose, “Input-shaping and model-following control of a helicopter carrying a suspended load,” J. of Guidance, Control, and Dynamics, Vol.38, No.1, pp. 94-105, 2014.
- [25] M. Pai, “Dynamic output feedback rbf neural network sliding mode control for robust tracking and model following,” Nonlinear Dynamics, Vol.79, No.2, pp. 1023-1033, 2015.
- [26] S. Mobayen, “Finite-time robust-tracking and model-following controller for uncertain dynamical systems,” J. of Vibration and Control, Vol.22, No.4, pp. 1117-1127, 2016.
- [27] J. Vaughan, A. Yano, and W. Singhose, “Comparison of robust input shapers,” J. of Sound and Vibration, Vol.315, pp. 797-815, 2008.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.