Paper:
Fuzzy-Integral Based Estimate of Vertical-Direction Error Caused by Pointing Fingers at Objects
Masayoshi Kanoh* and Tsuyoshi Nakamura**
*School of Engineering, Chukyo University
101-2 Yagoto Honmachi, Showa-ku, Nagoya, Aichi 466-8666, Japan
**Graduate School of Engineering, Nagoya Institute of Technology
Gokiso-cho, Showa-ku, Nagoya, Aichi 466-8555, Japan

There have been recent attempts to control home electric appliances and devices using robots. Information can be shared with robots by using finger pointing. Finger pointing is used as a means of communication with people around. However, when a person points at an object with a finger, position of the object cannot be indicated accurately. In this work, we studied the error between a target point, which a person tries to point at with a finger, and an observation point, which is actually pointed at. We also proposed an error estimation model using a fuzzy integral to estimate and correct the error at the observation point.
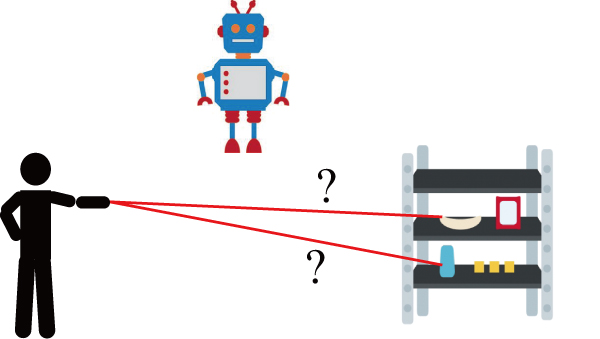
Can robot estimate object he wants?
- [1] E. Tamura, Y. Yamashita, T. Yamashita, E. Sato-Shimokawara, and T. Yamaguchi, “Movement Operation Interaction System for Mobility Robot Using Finger-Pointing Recognition,” J. Adv. Comput. Intell. Intell. Inform., Vol.21, No.4, pp. 709-715, 2017.
- [2] Y. Takahashi, K. Yoshida, F. Hibino, and Y. Maeda, “Human Pointing Navigation Interface for Mobile Robot with Spherical Vision System,” J. Adv. Comput. Intell. Intell. Inform., Vol.15, No.7, pp. 869-877, 2011.
- [3] E. Sato, A. Nakajima, J. Nakazato, and T. Yamaguchi, “Toward Natural Communication: Human-Robot Gestural Interaction Using Pointing,” J. Adv. Comput. Intell. Intell. Inform., Vol.11, No.3, pp. 276-281, 2007.
- [4] J. Richarz et al., “A Monocular Pointing Pose Estimator for Gestural Instruction of a Mobile Robot,” Int. J. of Advanced Robotic Systems, Vol.4, No.1, 2007.
- [5] C.-B. Park and S.-W. Lee, “Real-time 3D Pointing Gesture Recognition for Mobile Robots with Cascade HMM and Particle Filter,” Image and Vision Computing, Vol.29, No.1, pp. 51-63, 2011.
- [6] K. Yamazaki et al., “Home-Assistant Robot for an Aging Society,” Proc. of IEEE, Vol.100, No.8, pp. 2429-2441, 2012.
- [7] A. Mertens et al., “Assistive Robots in Eldercare and Daily Living: Automation of Individual Services for Senior Citizens,” Int. Conf. on Intelligent Robotics and Applications (ICIRA), pp. 542-552, 2011.
- [8] D. Droeschel et al., “Towards Joint Attention for a Domestic Service Robot-Person Awareness and Gesture Recognition using Time-of-Flight Cameras,” Int. Conf. on Robotics and Automation (ICRA), pp. 1205-1210, 2011.
- [9] T. Obo et al., “Pointing Gesture Detection for Humanoid-Robot Communication in Informationally Structured Space,” IEEE Symp. Series on Computational Intelligence, pp. 3148-3152, 2017.
- [10] Y. Yano, “A Study on Error Evaluation on the Difference of the Target Points of Pointing Gesture between Subjective Points and Objective Points,” 41st Tokai Fuzzy Symp., 2016 (in Japanese).
- [11] Y. Aikawa, K. Motoyama, M. Kanoh, T. Nakamura, and Y. Yano, “Correcting Pointing Position of Fingers by Using Inclusion-Exclusion Integral,” IEEE Int. Conf. on Fuzzy Systems (FUZZ-IEEE), pp. 1-4, 2018.
- [12] K. Kawasaki et al., “Analyzing Direction of Remote Controller to it’s Objects,” Correspondences on Human Interface, Vol.4, No.5, pp. 5_85–5_90, 2002 (in Japanese).
- [13] A. Honda and J. Okamoto, “Inclusion-Exclusion Integral and Its Application to Subjective Video Quality Estimation,” Information Processing and Management of Uncertainty in Knowledge-Based Systems, Theory and Methods, pp. 480-489, 2010.
- [14] A. Honda and Y. Okazaki, “Theory of inclusion-exclusion integral,” Information Sciences, Vol.376, pp. 136-147, 2017.
- [15] M. Grabisch, “k-order Additive Discrete Fuzzy Measures and Their Representation,” Fuzzy Sets and Systems, Vol.92, No.2, pp. 167-189, 1997.
- [16] K. Fujimoto and T. Murofushi, “Some Characterizations of the Systems Represented by Choquet and Multi-Linear Functionals through the use of Möbius Inversion,” Int. J. of Uncertainty, Fuzziness and Knowledge-Based Systems, Vol.5, No.5, pp. 547-561, 1997.
- [17] Y. Matsushita and H. Kambara, “Partition of Attribute and Fuzzy Integral Model for Evaluation Process,” Methodologies for the Conception, Design, and Application of Intelligent Systems: Proc. of the 4th Int. Conf. on Soft Computing (IIZUKA ’96), pp. 303-307, 1996.
- [18] D. Dubois and H. Prade, “New Results about Properties and Semantics of Fuzzy Set-Theoretic Operators,” Fuzzy Sets, pp. 59-75, 1980.
- [19] E. P. Klement, R. Mesiar, and E. Pap, “Triangular Norms,” Springer, 2000.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.