Paper:
A Method for Identifying Easy-to-Pinch Axillary Buds
Manabu Kawaguchi and Naoyuki Takesue

Tokyo Metropolitan University
6-6 Asahigaoka, Hino, Tokyo 191-0065, Japan

Robotics is essential for organic-farming expansion in Japan because of the climate and the declining and aging agricultural population. The demand for routine farming-task automation is growing in small-scale, open-field farms; these account for a large proportion of domestic farmland. Bud-pinching is one such routine task that involves the removal of axillary buds that are unnecessary for crop growth. If bud-pinching is not performed at an appropriate time, crop development may be affected negatively. Variability in the timing of axillary-bud emergence necessitates daily management. The detection and identification of typical stems has been addressed by conventional research; however, that of small and irregularly shaped axillary buds has not been studied sufficiently, and pinchable axillary-bud selection from densely clustered buds has not yet been automated. Plant stems were stably detected even under wind-induced movement, using a support vector machine (SVM) that focused on branch points, in our previous study. Branch points were identified as main stems, lateral branches, or axillary buds, and model effectiveness was experimentally evaluated and demonstrated. Axillary-bud detection has limitations caused by their small size, variable orientation, and tendency to be obscured by the surrounding flower buds, petals, or leaves. This study aimed to improve prediction accuracy by detecting and identifying the easy-to-pinch axillary buds. Our proposed method selected image regions by designing generic-template—containing branch points with sufficient space (for accessibility by the robot-arm end-effector)—and identified the stems within only those regions using our SVM model. The effectiveness of the proposed method was experimentally evaluated and demonstrated.
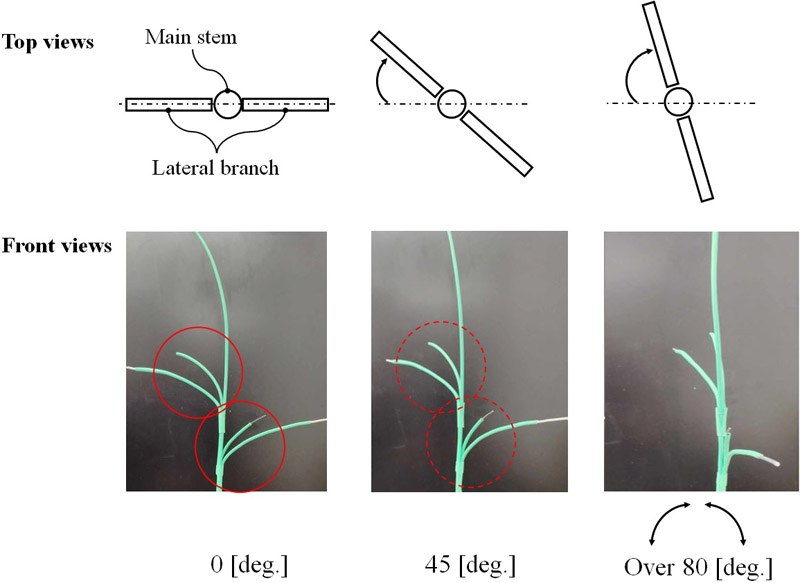
Comparative easy-to-pinch conditions
- [1] E. J. van Henten, J. Hemming, B. A. J. van Tuijl, J. G. Kornet, J. Meuleman, J. Bontsema, and E. A. van Os, “An Autonomous Robot for Harvesting Cucumbers in Greenhouses,” Autonomous Robots, Vol.13, No.3, pp. 241-258, 2002. https://doi.org/10.1023/A:1020568125418
- [2] S. Hayashi, K. Ganno, Y. Ishii, and I. Tanaka, “Robotic Harvesting System for Eggplants,” Japan Agricultural Research Quarterly: JARQ, Vol.36, Issue 3, pp. 163-168, 2002. https://doi.org/10.6090/jarq.36.163
- [3] A. De Preter, J. Anthonis, and J. De Baerdemaeker, “Development of a Robot for Harvesting Strawberries,” IFAC-PapersOnLine, Vol.51, Issue 17, pp. 14-19, 2018. https://doi.org/10.1016/j.ifacol.2018.08.054
- [4] E. J. Van Henten, B. A. J. Van Tuijl, G.-J. Hoogakker, M. J. Van Der Weerd, J. Hemming, J. G. Kornet, and J. Bontsema, “An Autonomous Robot for De-leafing Cucumber Plants grown in a High-wire Cultivation System,” Biosystems Engineering, Vol.94, Issue 3, pp. 317-323, 2006. https://doi.org/10.1016/j.biosystemseng.2006.03.005
- [5] J. Ci, X. Wang, D. Rapado-Rincón, A. K. Burusa, and G. Kootstra, “3D pose estimation of tomato peduncle nodes using deep keypoint detection and point cloud,” Biosystems Engineering, Vol.243, pp. 57-69, 2024. https://doi.org/10.1016/j.biosystemseng.2024.04.017
- [6] X. Li, J. Fang, and Y. Zhao, “A Multi-Target Identification and Positioning System Method for Tomato Plants Based on VGG16-UNet Model,” Applied Sciences, Vol.14, Issue 7, Article No.2804, 2024. https://doi.org/10.3390/app14072804
- [7] L. Xifeng, Z. Xinyu, and W. Yongwei, “Recognition method for the pruning points of tomato lateral branches using improved Mask R-CNN,” Trans. of the Chinese Society of Agricultural Engineering, Vol.38, No.23, pp. 112-121, 2022. https://doi.org/10.11975/j.issn.1002-6819.2022.23.012
- [8] K. Yamamoto, W. Guo, Y. Yoshioka, and S. Ninomiya, “On Plant Detection of Intact Tomato Fruits Using Image Analysis and Machine Learning Methods,” Sensors, Vol.14, Issue 7, pp. 12191-12206, 2014. https://doi.org/10.3390/s140712191
- [9] M. Wang, J. Xu, M. Wang, R. Liang, W. Cheng, and W. Ding, “Research on detection and location of tomato axillary bud growth point via lightweight YOLOv3 model,” 2023 IEEE 7th Information Technology and Mechatronics Engineering Conf. (ITOEC), Vol.7, pp. 2424-2429, 2023. https://doi.org/10.1109/ITOEC57671.2023.10291635
- [10] T. T. H. Giang, T. Q. Khai, D.-Y. Im, and Y.-J. Ryoo, “Fast Detection of Tomato Sucker Using Semantic Segmentation Neural Networks Based on RGB-D Images,” Sensors, Vol.22, Issue 14, Article No.5140, 2022. https://doi.org/10.3390/s22145140
- [11] M. Kawaguchi and N. Takesue, “A Method of Detection and Identification for Axillary Buds,” J. Robot. Mechatron., Vol.36, No.1, pp. 201-210, 2024. https://doi.org/10.20965/jrm.2024.p0201
- [12] M. Saito and M. Hashimoto, “Selection of stable template points based on spatio-temporal co-occurrence in update-based template matching,” Proc. of MIRU2011, Vol.2011, pp. 852-859, 2011 (in Japanese).
- [13] S. Nakamura and F. Saitoh, “High-speed image matching by selecting effective feature pixel in template,” The J. of the Institute of Image Electronics Engineers of Japan, Vol.41, No.4, pp. 392-397, 2012 (in Japanese). https://doi.org/10.11371/iieej.41.392
- [14] N. Shinohara, H. Ohno, and M. Hashimoto, “Evolved image matching method with template updating function based on disturbance prediction,” Proc. of Microelectronics Symp., Vol.26, pp. 359-362, 2016 (in Japanese). https://doi.org/10.11486/mes.26.0_359
- [15] F. Wu, J. Duan, S. Chen, Y. Ye, P. Ai, and Z. Yang, “Multi-Target Recognition of Bananas and Automatic Positioning for the Inflorescence Axis Cutting Point,” Front. Plant Sci., Vol.12, Article No.705021, 2021. https://doi.org/10.3389/fpls.2021.705021
- [16] Z. Yang and Y. Han, “A Low-Cost 3D Phenotype Measurement Method of Leafy Vegetables Using Video Recordings from Smartphones,” Sensors, Vol.20, Issue 21, Article No.6068, 2020. https://doi.org/10.3390/s20216068
- [17] G. Bao, S. Cai, L. Qi, Y. Xun, L. Zhang, and Q. Yang, “Multi-template matching algorithm for cucumber recognition in natural environment,” Computers and Electronics in Agriculture, Vol.127, pp. 754-762, 2016. https://doi.org/10.1016/j.compag.2016.08.001
- [18] Y. Guan, H. Hirakoshi, and Y. Ueda, “Recognition of Two-Dimensional Codes Utilizing Template Matching,” University of Marketing and Distribution Sciences (UMDS) Research Association, Vol.24, No.1, pp. 85-98, 2015.
- [19] L. Di Stefano, S. Mattoccia, and F. Tombari, “ZNCC-based template matching using bounded partial correlation,” Pattern Recognition Letters, Vol.26, Issue 14, pp. 2129-2134, 2005. https://doi.org/10.1016/j.patrec.2005.03.022
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.