Paper:
PAFgrip: A Passive Grasp and Release Mechanism for Space Debris Capture
Keisuke Watanabe, Teppei Okumura
 , Nobutaka Tanishima, Hiroyuki Okamoto
, and Kentaro Iki
, Nobutaka Tanishima, Hiroyuki Okamoto
, and Kentaro Iki
Japan Aerospace Exploration Agency (JAXA)
2-1-1 Sengen, Tsukuba, Ibaraki 305-8505, Japan

Japan Aerospace Exploration Agency (JAXA) is developing a debris capture device, HKK for active debris removal by utilizing a caging method to grasp the payload attachment fitting (PAF) of the upper stages of the rockets. The HKK can geometrically constrain all motions of the PAF, except for rotation around the symmetry axis of the PAF ring. To enhance the certainty of capture and complement form closure with a friction-based grip, an additional gripper, namely the PAFgrip, is proposed. This gripper is mounted at the end of the HKK arm; it passively grasps the PAF ring by converting the pushing force from the arm extension through a toggle mechanism. It can maintain the grasp without requiring a power supply, owing to its self-locking function. Additionally, a mechanism for adapting to variations in the thickness of the PAF ring has been designed. A passive release mechanism ensures that the PAF can be released without causing a significant reactive force, and a sensor system is implemented to detect the grasp state. Prototype testing validated that the PAFgrip can reliably grasp PAF rings with a thickness range of 1 mm using the extension force of HKK arm and hold on to the PAF against an external disturbance force of up to 80 N. Furthermore, the PAFgrip can release the PAF passively with a reactive force of less than 3 N, which is approximately 3% of the holding force.
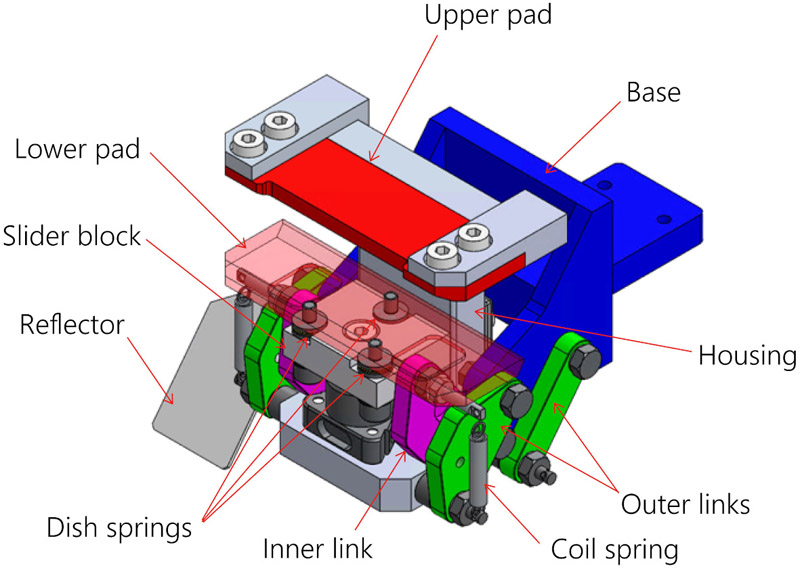
Structure of basic PAFgrip model
- [1] D. J. Kessler and B. G. Cour-Palais, “Collision frequency of artificial satellites: The creation of a debris belt,” J. of Geophysical Research: Space Physics, Vol.83, No.A6, pp. 2637-2646, 1978. https://doi.org/10.1029/JA083iA06p02637
- [2] A. Ledkov and V. Aslanov, “Review of contact and contactless active space debris removal approaches,” Progress in Aerospace Sciences, Vol.134, Article No.100858, 2022. https://doi.org/10.1016/j.paerosci.2022.100858
- [3] M. Shan, J. Guo, and E. Gill, “Review and comparison of active space debris capturing and removal methods,” Progress in Aerospace Sciences, Vol.80, pp. 18-32, 2016. https://doi.org/10.1016/j.paerosci.2015.11.001
- [4] N. Tanishima, H. Okamoto, K. Iki, K. Watanabe, and T. Okumura, “Concept and design of robustness improved caging based debris gripper,” 8th European Conf. on Space Debris, 2021.
- [5] S. Makita and W. Wan, “A survey of robotic caging and its applications,” Advanced Robotics, Vol.31, Nos.19-20, pp. 1071-1085, 2017. https://doi.org/10.1080/01691864.2017.1371075
- [6] T. Rybus, “Robotic manipulators for in-orbit servicing and active debris removal: Review and comparison,” Progress in Aerospace Sciences, Vol.151, Article No.101055, 2024. https://doi.org/10.1016/j.paerosci.2024.101055
- [7] E. Papadopoulos, F. Aghili, O. Ma, and R. Lampariello, “Robotic manipulation and capture in space: A survey,” Frontiers in Robotics and AI, Vol.8, Article No.686723, 2021. https://doi.org/10.3389/frobt.2021.686723
- [8] K. Fujii, I. Rodríguez, M. Schedl, G. Grunwald, and M. A. Roa, “Comparative analysis of robotic gripping solutions for cooperative and non-cooperative targets,” 2024 IEEE Aerospace Conf., 2024. https://doi.org/10.1109/AERO58975.2024.10520942
- [9] S. Jaekel et al., “Design and operational elements of the robotic subsystem for the e.deorbit debris removal mission,” Frontiers in Robotics and AI, Vol.5, Article No.100, 2018. https://doi.org/10.3389/frobt.2018.00100
- [10] W. Crooks, S. Rozen-Levy, B. Trimmer, C. Rogers, and W. Messner, “Passive gripper inspired by Manduca sexta and the Fin Ray® effect, Int. J. of Advanced Robotic Systems, Vol.14, No.4, 2017. https://doi.org/10.1177/1729881417721155
- [11] E. Brown et al., “Universal robotic gripper based on the jamming of granular material,” Proc. of the National Academy of Sciences, Vol.107, No.44, pp. 18809-18814, 2010. https://doi.org/10.1073/pnas.1003250107
- [12] M. Kodnongbua, I. Good, Y. Lou, J. Lipton, and A. Schulz, “Computational design of passive grippers,” ACM Trans. on Graphics, Vol.41, No.4, Article No.149, 2022. https://doi.org/10.1145/3528223.3530162
- [13] K. Nagaoka et al., “Passive spine gripper for free-climbing robot in extreme terrain,” IEEE Robotics and Automation Letters, Vol.3, No.3, pp. 1765-1770, 2018. https://doi.org/10.1109/LRA.2018.2794517
- [14] J. Hsu, E. Yoshida, K. Harada, and A. Kheddar, “Self-locking underactuated mechanism for robotic gripper,” 2017 IEEE Int. Conf. on Advanced Intelligent Mechatronics, pp. 620-627, 2017. https://doi.org/10.1109/AIM.2017.8014086
- [15] I. Nate, Z. Wang, and S. Hirai, “Passive robotic gripper using a contact-based locking mechanism,” 2023 IEEE Int. Conf. on Robotics and Automation, pp. 10303-10309, 2023. https://doi.org/10.1109/ICRA48891.2023.10160922
- [16] T. Nishimura, M. Tennomi, Y. Suzuki, T. Tsuji, and T. Watanabe, “Lightweight, high-force gripper inspired by chuck clamping devices,” IEEE Robotics and Automation Letters, Vol.3, No.3, pp. 1354-1361, 2018. https://doi.org/10.1109/LRA.2018.2795649
- [17] T. Takayama, Y. Chiba, and T. Omata, “Tokyo-TECH 100 N Hand: Three-fingered eight-DOF hand with a force-magnification mechanism,” 2009 IEEE Int. Conf. on Robotics and Automation, pp. 593-598, 2009. https://doi.org/10.1109/ROBOT.2009.5152835
- [18] M. Plooij, G. Mathijssen, P. Cherelle, D. Lefeber, and B. Vanderborght, “Lock your robot: A review of locking devices in robotics,” IEEE Robotics & Automation Magazine, Vol.22, No.1, pp. 106-117, 2015. https://doi.org/10.1109/MRA.2014.2381368
- [19] H. Okamoto and H. Kato, “The development of the hybrid dynamics simulation system for rendezvous and docking: SATDyn,” 2022 IEEE Aerospace Conf., 2022. https://doi.org/10.1109/AERO53065.2022.9843677
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.