Paper:
Developing a Planetary Subsurface Excavation Robot Using Annular Spiral Crawler Mechanism
Yuki Iwano* and Tatsuto Urata**
*Fukui University of Technology
3-6-1 Gakuen, Fukui, Fukui 910-8505, Japan
**National Institute of Technology, Akashi College
679-3 Nishioka, Uozumi-cho, Akashi, Hyogo 674-8501, Japan

The Moon’s interior holds valuable information for space research, making lunar excavation essential. Various research institutes are studying lunar excavation robots, but challenges remain in improving the excavation speed and ensuring the attitude stability of the airframe. To address these issues, an “annular spiral crawler mechanism” is proposed in which the crawler is wrapped around the cylindrical fuselage in a spiral shape. Evaluations confirm that the proposed mechanism enhances the excavation speed while ensuring the stability of the airframe by canceling the reaction force of the drill.
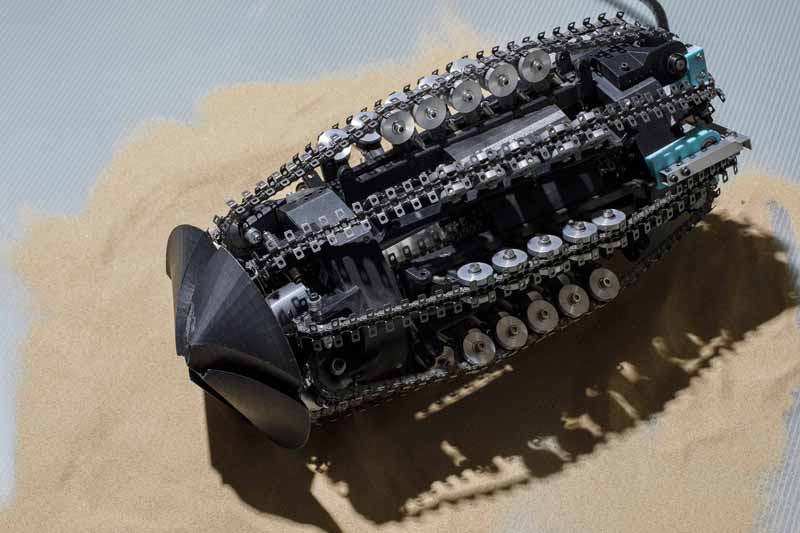
The developed excavation robot
- [1] R. Ejiri, T. Kubota, and I. Nakatani, “Vision-based behavior planning for lunar or planetary exploration rover on flat surface,” J. Robot. Mechatron., Vol.29, No.5, pp. 847-855, 2017. https://doi.org/10.20965/jrm.2017.p0847
- [2] K. Furutani and H. Kamiishi, “Percussive rock surface remover driven by solenoid with planer motion for lunar exploration,” J. Robot. Mechatron., Vol.29, No.5, pp. 911-918, 2017. https://doi.org/10.20965/jrm.2017.p0911
- [3] T. Yoshimitsu, M. Ootsuka, T. Kubota, and I. Nakatani, “Semi-autonomous telescience system for planetary exploration rover,” J. Robot. Mechatron., Vol.12, No.4, pp. 432-437, 2000. https://doi.org/10.20965/jrm.2000.p0432
- [4] K. Furutani, “Concept of inflatable outer wheel rover for exploration of lunar and planetary holes and subsurface caverns,” Int. J. Automation Technol., Vol.10, No.4, pp. 584-590, 2016. https://doi.org/10.20965/ijat.2016.p0584
- [5] K. Iizuka, T. Sasaki, H. Hama, A. Nishitani, T. Kubota, and I. Nakatani, “Development of a small, lightweight rover with elastic wheels for lunar exploration,” J. Robot. Mechatron., Vol.24, No.6, pp. 1031-1039, 2012. https://doi.org/10.20965/jrm.2012.p1031
- [6] Y. Kuroda, Y. Kunii, and T. Kubota, “Proposition of microrover system for lunar exploration,” J. Robot. Mechatron., Vol.12, No.2, pp. 91-95, 2000. https://doi.org/10.20965/jrm.2000.p0091
- [7] K. Nagaoka, T. Kubota, M. Otsuki, and S. Tanaka, “Robotic screw explorer for lunar subsurface investigation: Dynamics modelling and experimental validation,” 2009 Int. Conf. on Advanced Robotics, 2009.
- [8] S. Yasuda, K. Komatsu, and S. Tanaka, “Self-turning screw mechanism for burying geophysical sensors under regolith,” Proc. of the Int. Symp. on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS), Article No.09B02, 2012.
- [9] E. Mumm et al., “Heat flow probes for small lunar lander,” 41st Lunar and Planetary Science Conf., Article No.2128, 2010.
- [10] T. Nakatake et al., “Soil-circulating system for a peristaltic-type lunar excavation robot,” J. of the Robotics Society of Japan, Vol.35, No.3, pp. 230-238, 2017 (in Japanese). https://doi.org/10.7210/jrsj.35.230
- [11] A. Mizushina et al., “A discharging mechanism for a lunar subsurface explorer with the peristaltic crawling mechanism,” 6th Int. Conf. on Recent Advances in Space Technologies, pp. 955-960, 2013. https://doi.org/10.1109/RAST.2013.6581352
- [12] K. Osuka and H. Kitajima, “Development of four-crawler multilink mobile robot MOIRA for searching debris,” J. Robot. Mechatron., Vol.15, No.5, pp. 561-570, 2003. https://doi.org/10.20965/jrm.2003.p0561
- [13] Y. Iwano, K. Osuka, and H. Amano, “Development of rescue support stretcher system with stair-climbing,” J. Robot. Mechatron., Vol.25, No.3, pp. 567-574, 2013. https://doi.org/10.20965/jrm.2013.p0567
- [14] H. Kashiwa, T. Kurata, Y. Hayashi, S. Tamura, and K. Suita, “Displacement amplitude dependence of effect of pile group by cyclic lateral loading tests on large displacement,” J. of Structural and Construction Engineering (Trans. of AIJ), Vol.72, No.614, pp. 53-60, 2007 (in Japanese). https://doi.org/10.3130/aijs.72.53_1
- [15] Y. Suzuki and N. Adachi, “Estimation of pile group efficiency based on model horizontal loading tests and shaking table liquefaction tests,” J. of Structural and Construction Engineering (Trans. of AIJ), Vol.71, No.607, pp. 117-124, 2006 (in Japanese). https://doi.org/10.3130/aijs.71.117
- [16] A. Uchida, J. Hamada, T. Tsuchiya, K. Yamashita, and M. Kakurai, “Lateral loading tests on a model pile group in liquefied soil using large-scale laminar shear box,” J. of Structural and Construction Engineering (Trans. of AIJ), Vol.68, No.572, pp. 117-122, 2003. https://doi.org/10.3130/aijs.68.117_3
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.