Paper:
A Mobile Quad-Arm Robot ARMS: Wheeled-Legged Tripedal Locomotion and Loco-Manipulation
Hisayoshi Muramatsu, Keigo Kitagawa, Jun Watanabe, Yuika Yoshimoto, and Ryohei Hisashiki
Mechanical Engineering Program, Hiroshima University
1-4-1 Kagamiyama, Higashi-hiroshima, Hiroshima 739-8527, Japan

This paper proposes a mobile quad-arm robot, ARMS, that unifies wheeled-legged tripedal locomotion, wheeled locomotion, and loco-manipulation. ARMS’s four arms have different mechanical configurations for hybrid locomotion and loco-manipulation and are partially designed to be general-purpose arms. The one three-degree-of-freedom (DOF) arm has an active wheel that is used for wheeled-legged tripedal walking and wheeled driving with passive wheels attached to the torso. The two three-DOF general-purpose arms are series elastic and are used for wheeled-legged tripedal walking, object grasping, and manipulation. The upper two-DOF arm is used for manipulation only, and its position and orientation are determined by coordinating all the arms. Each motor is controlled using an angle controller and trajectory modification with angle, angular velocity, angular acceleration, and torque constraints. The capabilities of ARMS were verified with seven experiments involving joint control, wheeled-legged locomotion, wheeled locomotion and grasping, slope locomotion, block terrain locomotion, carrying a bag, and outdoor locomotion.
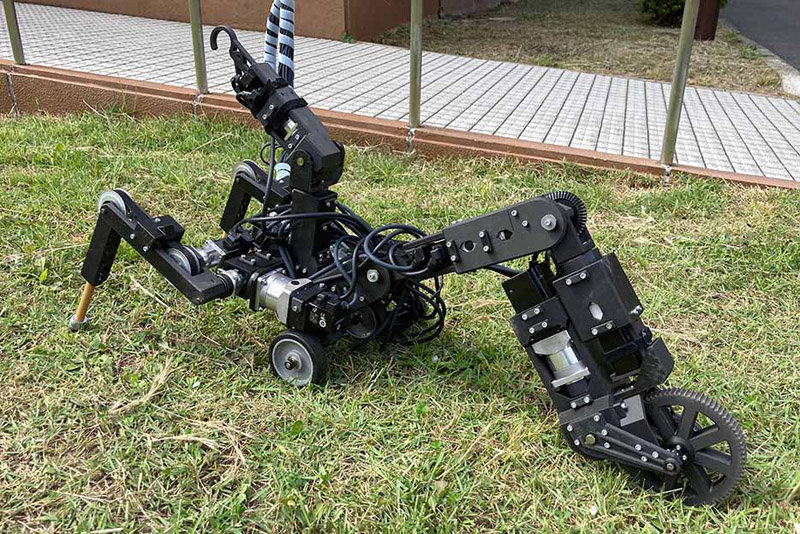
Mobile quad-arm robot: ARMS
- [1] B. Katz, J. D. Carlo, and S. Kim, “Mini Cheetah: A platform for pushing the limits of dynamic quadruped control,” Proc. IEEE Int. Conf. Robot. Autom., pp. 6295-6301, 2019. https://doi.org/10.1109/ICRA.2019.8793865
- [2] N. Kau, A. Schultz, N. Ferrante, and P. Slade, “Stanford Doggo: An open-source, quasi-direct-drive quadruped,” Proc. IEEE Int. Conf. Robot. Autom., pp. 6309-6315, 2019. https://doi.org/10.1109/ICRA.2019.8794436
- [3] J. Kim, T. Kang, D. Song, and S.-J. Yi, “Design and control of a open-source, low cost, 3D printed dynamic quadruped robot,” Appl. Sci., Vol.11, No.9, Article No.3762, 2021. https://doi.org/10.3390/app11093762
- [4] Y. H. Lee, Y. H. Lee, H. Lee, H. Kang, J. H. Lee, L. T. Phan, S. Jin, Y. B. Kim, D.-Y. Seok, S. Y. Lee, H. Moon, J. C. Koo, and H. R. Choi, “Development of a quadruped robot system with torque-controllable modular actuator unit,” IEEE Trans. Ind. Electron., Vol.68, No.8, pp. 7263-7273, 2021. https://doi.org/10.1109/TIE.2020.3007084
- [5] P. Arm, R. Zenkl, P. Barton, L. Beglinger, A. Dietsche, L. Ferrazzini, E. Hampp, J. Hinder, C. Huber, D. Schaufelberger, F. Schmitt, B. Sun, B. Stolz, H. Kolvenbach, and M. Hutter, “SpaceBok: A dynamic legged robot for space exploration,” Proc. IEEE Int. Conf. Robot. Autom., pp. 6288-6294, 2019. https://doi.org/10.1109/ICRA.2019.8794136
- [6] P. Čížek, M. Zoula, and J. Faigl, “Design, construction, and rough-terrain locomotion control of novel hexapod walking robot with four degrees of freedom per leg,” IEEE Access, Vol.9, pp. 17866-17881, 2021. https://doi.org/10.1109/ACCESS.2021.3053492
- [7] X. Zhang, Y. Xie, L. Jiang, G. Li, J. Meng, and Y. Huang, “Fault-tolerant dynamic control of a four-wheel redundantly-actuated mobile robot,” IEEE Access, Vol.7, pp. 157909-157921, 2019. https://doi.org/10.1109/ACCESS.2019.2949746
- [8] T. Hagiwara, Y. Yamamura, Y. Namima, J. Ogami, and L. Pengfei, “Production of crawler robot with sub crawler and verification of traversing ability,” Proc. ICA-SYMP, 2021. https://doi.org/10.1109/ICA-SYMP50206.2021.9358446
- [9] T. Takaki, T. Aoyama, and I. Ishii, “Development of inverted pendulum robot capable of climbing stairs using planetary wheel mechanism,” Proc. IEEE Int. Conf. Robot. Autom., pp. 5618-5624, 2013. https://doi.org/10.1109/ICRA.2013.6631384
- [10] K. Kaneko, H. Kaminaga, T. Sakaguchi, S. Kajita, M. Morisawa, I. Kumagai, and F. Kanehiro, “Humanoid robot HRP-5P: An electrically actuated humanoid robot with high-power and wide-range joints,” IEEE Robot. Autom. Lett., Vol.4, No.2, pp. 1431-1438, 2019. https://doi.org/10.1109/LRA.2019.2896465
- [11] J. Englsberger, A. Werner, C. Ott, B. Henze, M. A. Roa, G. Garofalo, R. Burger, A. Beyer, O. Eiberger, K. Schmid, and A. Albu-Schäffer, “Overview of the torque-controlled humanoid robot TORO,” Proc. IEEE-RAS Int. Conf. Humanoid Robots, pp. 916-923, 2014. https://doi.org/10.1109/HUMANOIDS.2014.7041473
- [12] O. Stasse, T. Flayols, R. Budhiraja, K. Giraud-Esclasse, J. Carpentier, J. Mirabel, A. Del Prete, P. Souères, N. Mansard, F. Lamiraux, J.-P. Laumond, L. Marchionni, H. Tome, and F. Ferro, “TALOS: A new humanoid research platform targeted for industrial applications,” Proc. IEEE-RAS Int. Conf. Humanoid Robots, pp. 689-695, 2017. https://doi.org/10.1109/HUMANOIDS.2017.8246947
- [13] P. Hebert, M. Bajracharya, J. Ma, N. Hudson, A. Aydemir, J. Reid, C. Bergh, J. Borders, M. Frost, M. Hagman, J. Leichty, P. Backes, B. Kennedy, P. Karplus, B. Satzinger, K. Byl, K. Shankar, and J. Burdick, “Mobile manipulation and mobility as manipulation—Design and algorithms of RoboSimian,” J. Field Robot., Vol.32, No.2, pp. 255-274, 2015. https://doi.org/10.1002/rob.21566
- [14] N. Kashiri, L. Baccelliere, L. Muratore, A. Laurenzi, Z. Ren, E. M. Hoffman, M. Kamedula, G. F. Rigano, J. Malzahn, S. Cordasco, P. Guria, A. Margan, and N. G. Tsagarakis, “CENTAURO: A hybrid locomotion and high power resilient manipulation platform,” IEEE Robot. Autom. Lett., Vol.4, No.2, pp. 1595-1602, 2019. https://doi.org/10.1109/LRA.2019.2896758
- [15] M. Bjelonic, C. D. Bellicoso, Y. de Viragh, D. Sako, F. D. Tresoldi, F. Jenelten, and M. Hutter, “Keep rollin’—Whole-body motion control and planning for wheeled quadrupedal robots,” IEEE Robot. Autom. Lett., Vol.4, No.2, pp. 2116-2123, 2019. https://doi.org/10.1109/LRA.2019.2899750
- [16] V. S. Medeiros, E. Jelavic, M. Bjelonic, R. Siegwart, M. A. Meggiolaro, and M. Hutter, “Trajectory optimization for wheeled-legged quadrupedal robots driving in challenging terrain,” IEEE Robot. Autom. Lett., Vol.5, No.3, pp. 4172-4179, 2020. https://doi.org/10.1109/LRA.2020.2990720
- [17] M. Schwarz, T. Rodehutskors, M. Schreiber, and S. Behnke, “Hybrid driving-stepping locomotion with the wheeled-legged robot momaro,” Proc. IEEE Int. Conf. Robot. Autom., pp. 5589-5595, 2016.
- [18] Z. Chen, S. Wang, J. Wang, K. Xu, T. Lei, H. Zhang, X. Wang, D. Liu, and J. Si, “Control strategy of stable walking for a hexapod wheel-legged robot,” ISA Trans., Vol.108, pp. 367-380, 2021. https://doi.org/10.1016/j.isatra.2020.08.033
- [19] G. Endo and S. Hirose, “Study on roller-walker – multi-mode steering control and self-contained locomotion –,” J. Robot. Mechatron., Vol.12, No.5, pp. 559-566, 2000. https://doi.org/10.20965/jrm.2000.p0559
- [20] K. Nagano and Y. Fujimoto, “Simplification of motion generation in the singular configuration of a wheel-legged mobile robot,” IEEJ J. Ind. Appl., Vol.8, No.5, pp. 745-755, 2019. https://doi.org/10.1541/ieejjia.8.745
- [21] M. Kumagai and K. Tamada, “Wheel locomotion of a biped robot using passive rollers – large biped robot roller walking using a variable-curvature truck –,” J. Robot. Mechatron., Vol.20, No.2, pp. 206-212, 2008. https://doi.org/10.20965/jrm.2008.p0206
- [22] C. Zhang, T. Liu, S. Song, and M. Q.-H. Meng, “System design and balance control of a bipedal leg-wheeled robot,” Proc. IEEE-RAS Int. Conf. Robot. Biomimetics, pp. 1869-1874, 2019. https://doi.org/10.1109/ROBIO49542.2019.8961814
- [23] V. Klemm, A. Morra, C. Salzmann, F. Tschopp, K. Bodie, L. Gulich, N. Küng, D. Mannhart, C. Pfister, M. Vierneisel, F. Weber, R. Deuber, and R. Siegwart, “Ascento: A two-wheeled jumping robot,” Proc. IEEE Int. Conf. Robot. Autom., pp. 7515-7521, 2019. https://doi.org/10.1109/ICRA.2019.8793792
- [24] X. Qiu, Z. Yu, L. Meng, X. Chen, L. Zhao, G. Huang, and F. Meng, “Upright and crawling locomotion and its transition for a wheel-legged robot,” Micromachines, Vol.13, No.8, 2022. https://doi.org/10.3390/mi13081252
- [25] C. Zhang, T. Liu, S. Song, J. Wang, and M. Q.-H. Meng, “Dynamic wheeled motion control of wheel-biped transformable robots,” Biomimetic Intell. Robot., Vol.2, No.2, Article No.100027, 2022. https://doi.org/10.1016/j.birob.2021.100027
- [26] T. Yoshioka, T. Takubo, T. Arai, and K. Inoue, “Hybrid locomotion of leg-wheel asterisk h,” J. Robot. Mechatron., Vol.20, No.3, pp. 403-412, 2008. https://doi.org/10.20965/jrm.2008.p0403
- [27] E. C. Orozco-Magdaleno, F. Gómez-Bravo, E. Castillo-Castañeda, and G. Carbone, “Evaluation of locomotion performances for a mecanum-wheeled hybrid hexapod robot,” IEEE/ASME Trans. Mechatronics, Vol.26, No.3, pp. 1657-1667, 2021. https://doi.org/10.1109/TMECH.2020.3027259
- [28] K. Tadakuma, R. Tadakuma, A. Maruyama, E. Rohmer, K. Nagatani, K. Yoshida, A. Ming, M. Shimojo, M. Higashimori, and M. Kaneko, “Mechanical design of the wheel-leg hybrid mobile robot to realize a large wheel diameter,” Proc. IEEE Int. Conf. on Intelligent Robots and Systems, pp. 3358-3365, 2010. https://doi.org/10.1109/IROS.2010.5651912
- [29] W.-H. Chen, H.-S. Lin, Y.-M. Lin, and P.-C. Lin, “TurboQuad: A novel leg-wheel transformable robot with smooth and fast behavioral transitions,” IEEE Trans. Robot., Vol.33, No.5, pp. 1025-1040, 2017. https://doi.org/10.1109/TRO.2017.2696022
- [30] C. Zheng and K. Lee, “WheeLeR: Wheel-leg reconfigurable mechanism with passive gears for mobile robot applications,” Proc. IEEE Int. Conf. Robot. Autom., pp. 9292-9298, 2019. https://doi.org/10.1109/ICRA.2019.8793686
- [31] Y. Kim, Y. Lee, S. Lee, J. Kim, H. S. Kim, and T. Seo, “STEP: A new mobile platform with 2-DOF transformable wheels for service robots,” IEEE/ASME Trans. Mechatronics, Vol.25, No.4, pp. 1859-1868, 2020. https://doi.org/10.1109/TMECH.2020.2992280
- [32] C. Sun, G. Yang, S. Yao, Q. Liu, J. Wang, and X. Xiao, “RHex-T3: A transformable hexapod robot with ladder climbing function,” IEEE/ASME Trans. Mechatronics, Vol.28, No.4, pp. 1939-1947, 2023. https://doi.org/10.1109/TMECH.2023.3276756
- [33] J. Hooks, M. S. Ahn, J. Yu, X. Zhang, T. Zhu, H. Chae, and D. Hong, “ALPHRED: A multi-modal operations quadruped robot for package delivery applications,” IEEE Robot. Autom. Lett., Vol.5, No.4, pp. 5409-5416, 2020. https://doi.org/10.1109/LRA.2020.3007482
- [34] R. Kikuuwe, “A sliding-mode-like position controller for admittance control with bounded actuator force,” IEEE/ASME Trans. Mechatronics, Vol.19, No.5, pp. 1489-1500, 2014. https://doi.org/10.1109/TMECH.2013.2286411
- [35] R. Kikuuwe, S. Yasukouchi, H. Fujimoto, and M. Yamamoto, “Proxy-based sliding mode control: A safer extension of PID position control,” IEEE Trans. Robot., Vol.26, No.4, pp. 670-683, 2010. https://doi.org/10.1109/TRO.2010.2051188
- [36] R. Kikuuwe and H. Fujimoto, “Proxy-based sliding mode control for accurate and safe position control,” Proc. IEEE Int. Conf. Robot. Autom., pp. 25-30, 2006. https://doi.org/10.1109/ROBOT.2006.1641156
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.