Paper:
Development of Self-Powered Prosthetic Finger with Pneumatic Passive Joints for Distal Interphalangeal Joint Amputees
Kotaro Nishikawa*, Kentaro Hirata**
 , and Masahiro Takaiwa***
, and Masahiro Takaiwa***
*Department of Integrated Science and Technology, National Institute of Technology, Tsuyama College
624-1 Numa, Tsuyama, Okayama 708-8509, Japan
**Department of Electrical Engineering, Faculty of Science and Engineering, Doshisha University
1-3 Tatara Miyakodani, Kyotanabe, Kyoto 610-0321, Japan
***Graduate School of Technology, Industrial and Social Sciences, Tokushima University
2-1 Minamijosanjima, Tokushima 770-8506, Japan

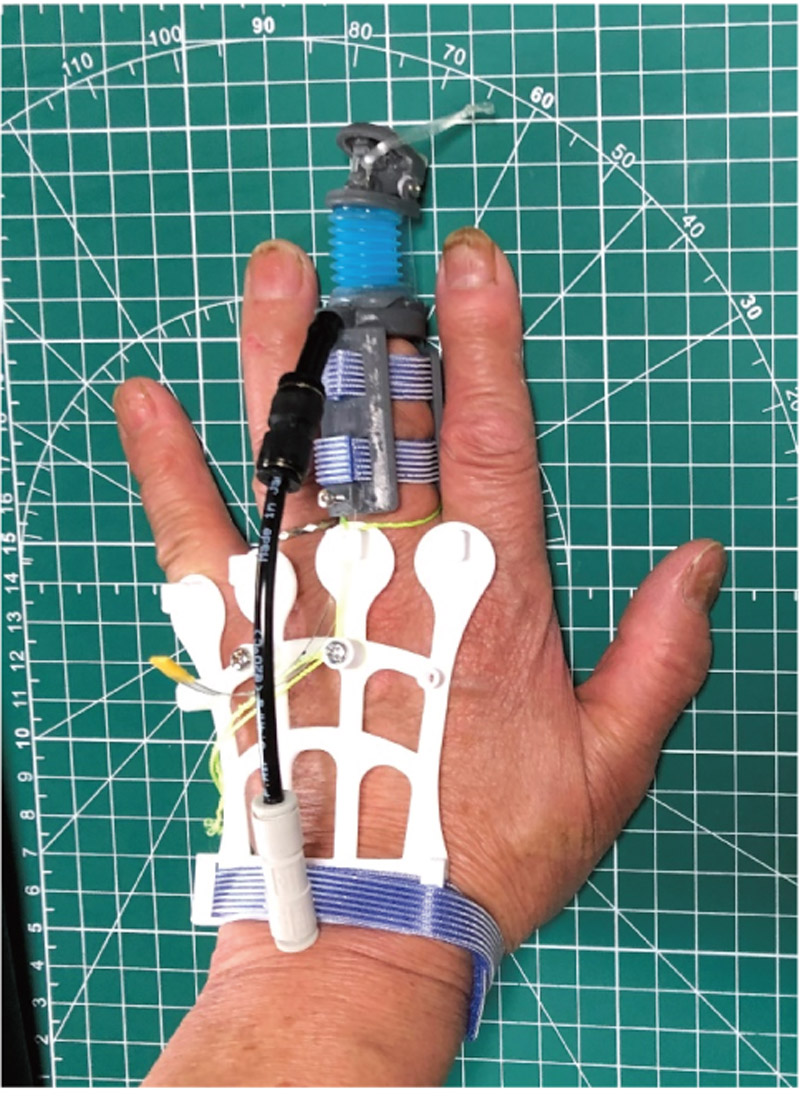
Myoelectric prosthetic hands and fingers with grasping functions have challenges such as weight, cost, and grasping performance of flexible objects owing to the use of electric actuators. To resolve these problems, we propose a self-powered movable prosthetic finger using pneumatic pressure. This prosthetic finger utilizes the flexion/extension of the remaining finger of the user to drive a wire and flex or extend the finger joints. The use of a tendon (wire) and belt drives reduces the space occupied by the prosthetic finger unit compared with conventional linked prosthetic fingers. Furthermore, a sealed-air bellows is used for the joint for flexible grasping owing to passive variable-compliance and damping, which is impossible with only a tendon drive. These features have resulted in the stable grasping of various objects that are difficult to grasp using prosthetic fingers based on conventional technologies.
Self-powered prosthetic finger
- [1] Y. Sato, “Real prosthetic hand,” Rehabilitation Engineering, Vol.29, No.3, pp. 125-128, 2014 (in Japanese). https://doi.org/10.24691/resja.29.3_125
- [2] M. Hasegawa, A. Otsuka, K. Shimatani, S. Kanai, S. Oki, T. Chin, and H. Moriyasu, “Consideration of a new prosthetic hand,” Bulletin of the Japanese Society of Prosthetics and Orthotics, Vol.26, No.2, pp. 97-101, 2010 (in Japanese). https://doi.org/10.11267/jspo.26.97
- [3] N. Wang, K. Lao, and X. Zhang, “Design and myoelectric control of an anthropomorphic prosthetic hand,” J. of Bionic Engineering, Vol.14, pp. 47-59, 2017. https://doi.org/10.1016/S1672-6529(16)60377-3
- [4] N. Unanyan and A. Belov, “Low-price prosthetic hand controlled by EMG signals,” IFAC-PapersOnLine, Vol.54, No.13, pp. 299-304, 2021. https://doi.org/10.1016/j.ifacol.2021.10.463
- [5] J. Starke, P. Weiner, M. Crell, and T. Asfour, “Semi-autonomous control of prosthetic hands based on multimodal sensing, human grasp demonstration and user intention,” Robotics and Autonomous Systems, Vol.154, Article No.104123, 2022. https://doi.org/10.1016/j.robot.2022.104123
- [6] A. Mohammadi, J. Lavranos, H. Zhou, R. Mutlu, G. Alici, Y. Tan, P. Choong, and D. Oetomo, “A practical 3D-printed soft robotic prosthetic hand with multi-articulating capabilities,” Plos One, Vol.15, No.5, Article No.e0232766, 2020. https://doi.org/10.1371/journal.pone.0232766
- [7] M. Yoshikawa, Y. Taguchi, S. Sakamoto, S. Yamanaka, Y. Matsumoto, T. Ogasawara, and N. Kawashima, “Low-cost and lightweight trans-radial prosthesis with three opposed fingers considering functionality and design,” J. of the Robotics Society of Japan, Vol.32, No.5, pp. 456-463, 2014 (in Japanese). https://doi.org/10.7210/jrsj.32.456
- [8] M. Yoshikawa and N. Kawashima, “Commercialization and promotion of electric prosthetic hand ‘Finch’,” J. of the Robotics Society of Japan, Vol.38, No.2, pp. 131-134, 2020 (in Japanese). https://doi.org/10.7210/jrsj.38.131
- [9] M. Yoshikawa, “Upper limb prostheses developed with digital fabrication tools,” J. of the Japanese Society of Prosthetics and Orthotics, Vol.34, No.2, pp. 115-118, 2018 (in Japanese). https://doi.org/10.11267/jspo.34.115
- [10] M. Yoshikawa, Y. Taguchi, S. Sakamoto, S. Yamanaka, Y. Matsumoto, T. Ogasawara, and N. Kawashima, “Trans-radial prosthesis with three opposed fingers,” Proc. of 2013 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 1493-1498, 2013. https://doi.org/10.1109/IROS.2013.6696546
- [11] M. Yoshikawa, “Three-fingered electric prosthetic hand produced with a 3D printer,” J. of the Japanese Society of Prosthetics and Orthotics, Vol.32, No.3, pp. 154-159, 2016 (in Japanese). https://doi.org/10.11267/jspo.32.154
- [12] S. Togo, H. Yokoi, Y. Jiang, Y. Yabuki, Y. Murai, and Y. Yamanoi, “Social implementation of EMG prosthetic hand,” J. of the Robotics Society of Japan, Vol.38, No.2, pp. 127-130, 2020 (in Japanese). https://doi.org/10.7210/jrsj.38.127
- [13] Y. Yabuki, Y. Ono, T. Hirai, Y. Kuroda, Y. Yamanoi, and H. Yokoi, “Development and evaluation of a myoelectric prosthetic hand socket adaptable to individuality for children,” Proc. of the 2020 JSME Conf. on Robotics and Mechatronics, 2A1-F06, 2020 (in Japanese). https://doi.org/10.1299/jsmermd.2020.2A1-F06
- [14] S. Nakao, T. Hirai, Y. Ono, Y. Yamanoi, Y. Kuroda, Y. Yabuki, S. Togo, Y. Jiang, R. Kato, T. Takagi, M. Ishihara, and H. Yokoi, “Development of robotic hand for prosthetic limb using a gear mechanism for infants with congenital upper limb defects,” J. of the Robotics Society of Japan, Vol.40, No.10, pp. 903-914, 2022 (in Japanese). https://doi.org/10.7210/jrsj.40.903
- [15] Y. Murai, Y. Yabuki, M. Ishihara, T. Takagi, S. Takayama, S. Togo, R. Kato, Y. Jiang, and H. Yokoi, “Development a myoelectric prosthetic hand for partial hand amputees to use successfully remaining finger – Proposal of the design method for mechanical system and control system and prototype –,” J. of Society of Biomechanisms Japan, Vol.43, No.2, pp. 124-133, 2019 (in Japanese). https://doi.org/10.3951/sobim.43.2_124
- [16] F. Gao, H. Deng, and Y. Zhang, “Hybrid actuator combining shape memory alloy with DC motor for prosthetic fingers,” Sensors and Actuators A: Physical, Vol.223, pp. 40-48, 2015. https://doi.org/10.1016/j.sna.2014.11.025
- [17] N. Dechev, W. Cleghorn, and S. Naumann, “Multiple finger, passive adaptive grasp prosthetic hand,” Mechanism and Machine Theory, Vol.36, pp. 1157-1173, 2001. https://doi.org/10.1016/S0094-114X(01)00035-0
- [18] Y. Yan, X. Chen, C. Cheng, and Y. Wang, “Design, kinematic modeling and evaluation of a novel soft prosthetic hand with abduction joints,” Medicine in Novel Technology and Devices, Vol.15, Article No.100151, 2022. https://doi.org/10.1016/j.medntd.2022.100151
- [19] M. Devi, G. Udupa, and P. Sreedharan, “A novel underactuated multi-fingered soft robotic hand for prosthetic application,” Robotics and Autonomous Systems, Vol.100, pp. 267-277, 2018. https://doi.org/10.1016/j.robot.2017.11.005
- [20] S. Yamaguchi and H. Tomori, “Development of human like robotic hand using pneumatic artificial rubber muscle,” Proc. of 329th Research Meeting on the Society of Instrument and Control Engineers Tohoku Chapter, 2020 (in Japanese).
- [21] H. Yamashita, T. Doi, Y. Yamada, T. Nomura, and T. Noritsugu, “Development of a prosthetic terminal device using pneumatic artificial muscle,” Proc. of the 2019 JSME Conf. on Robotics and Mechatronics, 2A1B05, 2019 (in Japanese). https://doi.org/10.1299/jsmermd.2019.2A1-B05
- [22] K. Nishikawa, K. Hirata, and M. Takaiwa, “Development of self-powered 5-finger pneumatically driven hand prosthesis using supination of forearm,” J. Robot. Mechatron., Vol.34, No.2, pp. 454-465, 2022. https://doi.org/10.20965/jrm.2022.p0454
- [23] H. Nakamura, K. Ohnishi, A. Hanafusa, A. Shishido, S. Hayashi, Y. Motozi, and H. Iwakuni, “Design of hyperextension mechanism to enhance fingertip force of multi-joint linkage mechanism body-powered finger prosthesis,” Proc. of the 2023 JSME Conf. IIP2023, IIPB-4-26, 2023 (in Japanese). https://doi.org/10.11267/jspo.32.160
- [24] A. Nakagawa, “Introduction of the e-NABLE hand and its community,” Bulletin of the Japanese Society of Prosthetics and Orthotics, Vol.32, No.3, pp. 160-165, 2016 (in Japanese). https://doi.org/10.11267/jspo.32.160
- [25] A. Thomas and T. Muñecas, “A rehabilitation protocol for the use of a 3D-printed prosthetic hand in pediatrics: A case report,” J. of Hand Therapy, Vol.36, pp. 967-973, 2023. https://doi.org/10.1016/j.jht.2022.10.010
- [26] M.-Y. Lee, S. H. Lee, J.-H. Leigh et al., “Functional improvement by body-powered 3D-printed prosthesis in patients with finger amputation,” Medicine, Vol.101, No.25, Article No.e29182, 2022. https://doi.org/10.1097%2FMD.0000000000029182
- [27] Y. Yabuki, K. Tanahashi, E. Hoshikawa, T. Nakamura, Y. Jiang, R. Kato, and H. Yokoi, “Development of new cosmetic gloves for a myoelectric prosthetic hand by using elastomer,” J. of the Japanese Society of Prosthetics and Orthotics, Vol.32, No.3, pp. 177-185, 2016 (in Japanese). https://doi.org/10.11267/jspo.32.177
- [28] Y. Yabuki, K. Tanahashi, Y. Mouri, Y. Murai, S. Togo, R. Kato, Y. Jiang, and H. Yokoi, “Development of new cosmetic gloves for a myoelectric prosthetic hand using superelastic rubber,” Robotics and Autonomous Systems, Vol.111, pp. 31-43, 2019. https://doi.org/10.1016/j.robot.2018.09.004
- [29] P. J. Kyberd, D. Findlayson, M. Jayasuriya, and F. Chibante, “A strengthened and sensorised custom silicone glove for use with an intelligent prosthetic hand,” Medical Engineering & Physics, Vol.107, Article No.103845, 2022. https://doi.org/10.1016/j.medengphy.2022.103845
- [30] K. Nishikawa, K. Hirata, and M. Takaiwa, “Development of pneumatically driven hand capable of grasping flexible objects,” J. Robot. Mechatron., Vol.32, No.5, pp. 923-930, 2020. https://doi.org/10.20965/jrm.2020.p0923
- [31] K. Nishikawa, K. Hirata, and M. Takaiwa, “Development of self-powered pneumatic prosthetic hand with tactile feedback,” Trans. of the Japan Fluid Power System Society, Vol.49, No.2, pp. 56-63, 2018 (in Japanese). https://doi.org/10.5739/jfps.49.56
- [32] N. Nakazawa, Y. Uekita, R. Ikeura, and H. Inooka, “Impedance characteristics of human finger joints,” Trans. of the Japan Society of Mechanical Engineers, Series C, Vol.66, No.641, pp. 214-219, 2000 (in Japanese). https://doi.org/10.1299/kikaic.66.214
- [33] The Japanese Association of Rehabilitation Medicine, “Joint range of motion indication and measurement methods,” J. of Rehabilitation Medicine, Vol.58, No.10, pp. 1188-1200, 2021 (in Japanese). https://doi.org/10.2490/jjrmc.58.1188
- [34] J. J. Kim, J. Kim, J. Lee, and J. Shin, “Influence of lifestyle pattern on preference for prosthetic hands: Understanding the development pathway for 3d-printed prostheses,” J. of Cleaner Production, Vol.379, Article No.134599, 2022. https://doi.org/10.1016/j.jclepro.2022.134599
- [35] M. Kumar, Krishnanand, A. Varshney, and M. Taufik, “Hand prosthetics fabrication using additive manufacturing,” Materials Today: Proceedings, 2023. https://doi.org/10.1016/j.matpr.2023.06.396
- [36] T. Okuyama, T. Irie, H. Ito, O. Oikawa, T. Kakui, N. Miyoshi, and T. Hirayama, “X-Finger® is functional artificial fingers: A case report,” J. of the Japanese Clinical Orthopaedic Association, Vol.45, No.1, pp. 93-94, 2020 (in Japanese). https://doi.org/10.15107/jcoa.M12-5
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.