Paper:
Error Covariance Estimation of 3D Point Cloud Registration Considering Surrounding Environment
Koki Aoki*1, Tomoya Sato*2, Eijiro Takeuchi*3, Yoshiki Ninomiya*4, and Junichi Meguro*1
*1Meijo University
1-501 Shiogamaguchi, Tempaku-ku, Nagoya 468-8502, Japan
*2MAP IV, Inc.
1-1-3 Meieki, Nakamura-ku, Nagoya 450-6627, Japan
*3TIER IV, Inc.
1-12-10 Kitashinagawa, Shinagawa-ku, Tokyo 140-0001, Japan
*4Nagoya University
Furo-cho, Chikusa-ku, Nagoya 464-8601, Japan

To realize autonomous vehicle safety, it is important to accurately estimate the vehicle’s pose. As one of the localization techniques, 3D point cloud registration is commonly used. However, pose errors are likely to occur when there are few features in the surrounding environment. Although many studies have been conducted on estimating error distribution of 3D point cloud registration, the real environment is not reflected. This paper presents real-time error covariance estimation in 3D point cloud registration according to the surrounding environment. The proposed method provides multiple initial poses for iterative optimization in the registration method. Using converged poses in multiple searches, the error covariance reflecting the real environment is obtained. However, the initial poses were limited to directions in which the pose error was likely to occur. Hence, the limited search efficiently determined local optima of the registration. In addition, the process was conducted within 10 Hz, which is laser imaging detection and ranging (LiDAR) period; however, the execution time exceeded 100 ms in some places. Therefore, further improvement is necessary.
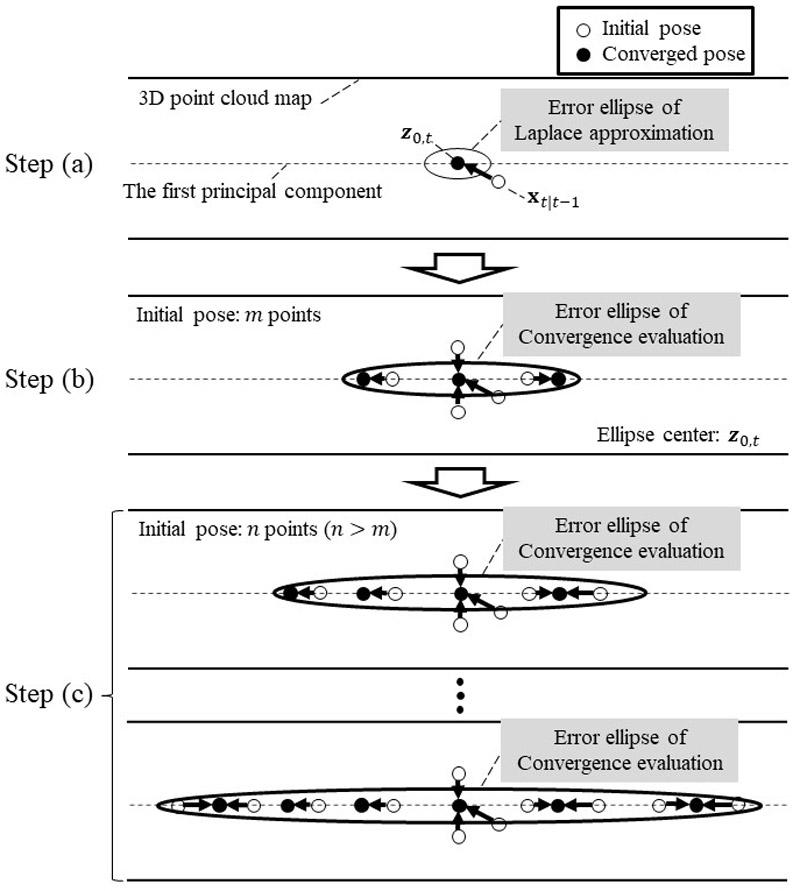
Overview of our proposed method, e.g., tunnel
- [1] M. Elhousni and X. Huang, “A survey on 3D LiDAR Localization for Autonomous Vehicles,” IEEE Intelligent Vehicle Symp. (IV), pp. 1608-1613, 2020.
- [2] E. Yurtsever, J. Lambert, A. Carballo, and K. Takeda, “A survey of autonomous driving: Common practices and emerging technologies,” IEEE Access, Vol.8, pp. 58443-58469, 2020.
- [3] K. Takahashi, T. Ono, T. Takahashi, M. Suzuki, and Y. Arai, “Performance Evaluation of Robot Localization Using 2D and 3D Point Clouds,” J. Robot. Mechatron., Vol.29, No.5, pp. 928-934, 2017.
- [4] P. J. Besl and N. D. McKey, “A Method for Registration of 3D Shapes,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.14, No.2, pp. 239-256, 1992.
- [5] Y. Chen and G. Medioni, “Object Modelling by Registration of Multiple Range Images,” J. of Image and Vision Computing, Vol.10, No.3, pp. 145-155, 1992.
- [6] P. Biber and W. Straßer, “The normal distributions transform: a new approach to laser scan matching,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Vol.3, pp. 2743-2748, 2003.
- [7] E. Takeuchi and T. Tsubouchi, “A 3-D Scan Matching Using Improved 3-D Normal Distributions Transform for Mobile Robotic Mapping,” Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 3068-3073, 2006.
- [8] M. Magnusson, A. Lilienthal, and T. Duckett, “Scan Registration for Autonomous Mining Vehicles Using 3D-NDT,” J. of Field Robotics, Vol.24, No.10, pp. 803-827, 2007.
- [9] T. Stoyanov, M. Magnusson, H. Andreasson, and A. J. Lilienthal, “Fast and accurate scan registration through minimization of the distance between compact 3D NDT representations,” Int. J. of Robotics Research (IJRR), Vol.31, No.12, pp. 1377-1393, 2012.
- [10] M. Magnusoon, A. Nuchter, C. Lorken, A. J. Lilienthal, and J. Hertzberg, “Evaluation of 3D Registration Reliability and Speed - A Comparison of ICP and NDT,” Proc. IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 3907-3912, 2009.
- [11] R. E. Kalman, “A new approach to linear filtering and prediction problems,” J. of Basic Engineering, Vol.82, No.1, pp. 35-45, 1960.
- [12] M. Magnusson, “The three-dimensional normal-distributions transform an efficient representation for registration surface analysis, and loop detection,” Doctoral Thesis, Örebro University, 2009.
- [13] O. Bengtsson and A. J. Baerveldt, “Localization in Changing Environments – Estimation of a Covariance Matrix for the IDC Algorithm,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1931-1937, 2001.
- [14] A. Censi, “An Accurate Closed-form Estimate of ICP’s Covariance,” Proc. of 2007 IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 4170-4175, 2007.
- [15] N. Akai, L. Y. Morales, T. Yamaguchi, E. Takeuchi, Y. Yoshihara, H. Okuda, T. Suzuki, and Y. Ninomiya, “Autonomous driving based on accurate localization using multilayer lidar and dead reckoning,” Proc. IEEE 20th Int. Conf. on Intelligent Transportation Systems Conf. (ITSC), pp. 1-6, 2017.
- [16] S. Srinara, S. Tsai, C.-X. Lin, M.-L. Tsai, and K.-W. Chiang, “Reliable Evaluation of Navigation States Estimation for automated Driving Systems,” IEEE Intelligent Vehicle Symp. (IV), pp. 1765-1773, 2022.
- [17] N. Akai, L. Y. Morales, E. Takeuchi, Y. Yoshihara, and Y. Ninomiya, “Robust Localization Using 3D NDT Scan Matching with Experimentally Determined Uncertainty and Road Marker Matching,” IEEE Intelligent Vehicle Symp. (IV), pp. 1356-1363, 2017.
- [18] T. Murakami, Y. Kitsukawa, E. Takeuchi, Y. Ninomiya, and J. Meguro, “Evaluation Technique of 3D Point Clouds for Autonomous Vehicles Using the Convergence of Matching Between the Points,” IEEE/SICE Int. Symp. on System Integration (SII), pp. 722-725, 2020.
- [19] R. N. Jazar, “Vehicle Dynamics, ” 2rd ed., Springer, p. 651, 2013.
- [20] E. Javanmardi, M. Javanmardi, Y. Gu, and S. Kamijo, “Factors to evaluate capability of map for vehicle localization,” IEEE Access, Vol.6. pp. 49850-49867, 2018.
- [21] Y. Kitsukawa, T. Minami, Y. Yamazaki, J. Meguro, E. Takeuchi, Y. Ninomiya, S. Kato, and M. Edashiro, “Robustness Evaluation of Vehicle Localization in 3D Map Using Convergence of Scan Matching,” Proc. of JSAE Annual Congress (Spring), Article No.3-012, 2022.
- [22] A. Carballo, A. Monrroy, D. Wong, P. Narksri, J. Lambert, Y. Kitsukawa, E. Takeuchi, S. Kato, and K. Takeda, “Characterization of Multiple 3D LiDARs for Localization and Mapping Performance using the NDT Algorithm,” IEEE Intelligent Vehicle Symp. (IV), pp. 327-324, 2021.
- [23] T. Reid, S. Houts, R. Cammarata, G. Mills, S. Agarwal, A. Vora, and G. Pandey, “Localization requirements for autonomous vehicles,” SAE Int. J. of Connected and Automated Vehicles, Vol.2, pp. 173-190, 2019.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.