Paper:
Effects of the Mechanical Closed-Loop Between the Body and the Ground on the Postural Balance of Gaits
Shuya Ishikawa and Yusuke Ikemoto
Department of Mechanical Engineering, Faculty of Science and Technology, Meijo University
1-501 Shiogamaguchi, Tempaku, Nagoya 468-8502, Japan

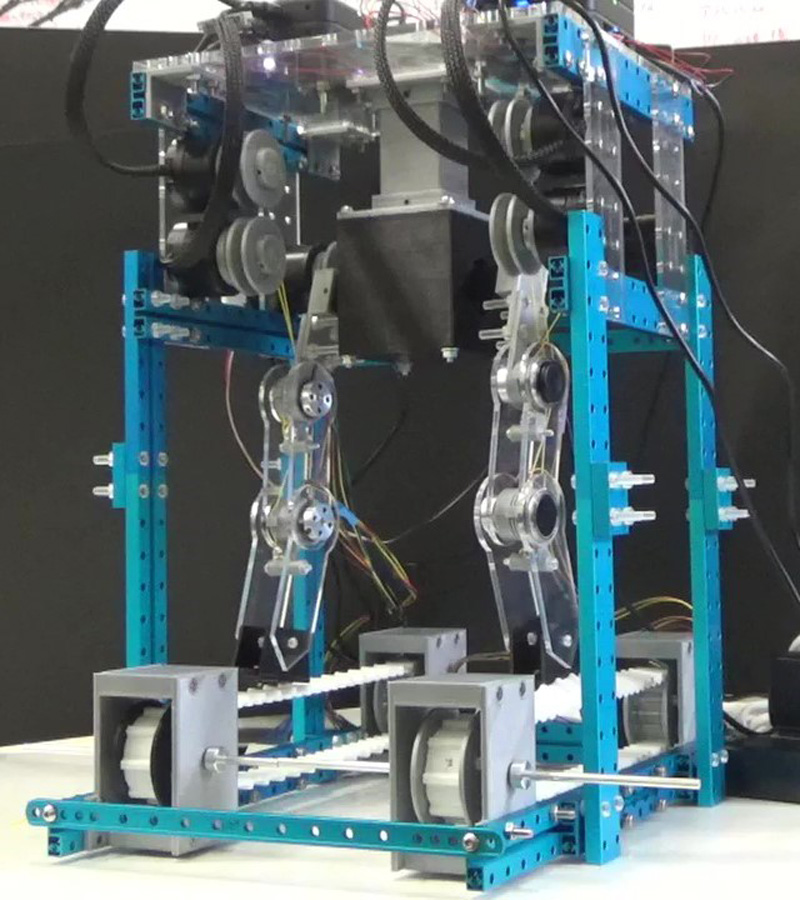
People and animals adapt their gait to the environment as they perform activities in a variety of environments. However, there are cases where the parts of the body necessary for walking are damaged in some way, resulting in walking difficulties. An example is paralysis caused by a stroke. A split-belt treadmill is occasionally used for the investigation to analyze how the stroke effects on the motion. However, the mechanical properties of the split-belt treadmill on the body have not been clarified. It is also unknown how the mechanical closed-loop between the body and the environment, generated by synchronizing the movements of the two belts, affects the gait. In this study, we investigated that the effect of the mechanical closed-loop structure between the body and the environment on walking using the robot and the mechanical effect of the floor reaction force on the body. Further, we conducted walking experiments using the developed robot, obtained body and environmental information, and analyzed the results. As the result, it was observed that the motion data differed based on the coupling of the treadmill. In other words, it was suggested that the mechanical closed-loop structure certainly influenced the physical balances on walking motion. Furthermore, it is confirmed that the coupling of treadmills increases the body’s sway. Although our results are given from a robotic experiment, it is expected that these measures would be one of the important index in human rehabilitations.
The mechanical closed-loop certainly influenced the physical balances on walking
- [1] H. Asama and J. Ota, “Special Issue on Mobiligence: Emergence of Adaptive Motor Function Through Interaction Among the Body, Brain and Environment,” J. Robot. Mechatron., Vol.19, No.4, p. 363, doi: 10.20965/jrm.2007.p0363, 2007.
- [2] K. Naniwa et al., “Novel Method for Analyzing Flexible Locomotion Patterns of Animals by Using Polar Histogram,” J. Robot. Mechatron., Vol.32, No.4, pp. 812-821, doi: 10.20965/jrm.2020.p0812, 2020.
- [3] D. S. Reisman et al., “Split-belt treadmill training post-stroke: A case study,” J. Neurol. Phys. Ther., Vol.34, No.4, pp. 202-207, doi: 10.1097/NPT.0b013e3181fd5eab, 2010.
- [4] T. J. W. Buurke et al., “Adaptive control of dynamic balance in human gait on a split-belt treadmill,” J. Exp. Biol., Vol.221, No.13, jeb174896, doi: 10.1242/jeb.174896, 2018.
- [5] M. J. MacLellan et al., “Muscle activation patterns are bilaterally linked during split-belt treadmill walking in humans,” J. Neurophysiol., Vol.111, No.8, pp. 1541-1552, doi: 10.1152/jn.00437.2013, 2014.
- [6] J. Seuthe et al., “Split-belt treadmill walking in patients with Parkinson’s disease: A systematic review,” Gait Posture, Vol.69, pp. 187-194, doi: 10.1016/j.gaitpost.2019.01.032, 2019.
- [7] T. Ogawa et al., “Predictive control of ankle stiffness at heel contact is a key element of locomotor adaptation during split-belt treadmill walking in humans,” J. Neurophysiol., Vol.111, No.4, pp. 722-732, doi: 10.1152/jn.00497.2012, 2014.
- [8] R. T. Roemmich et al., “Lower extremity sagittal joint moment production during split-belt treadmill walking,” J. Biomech., Vol.45, No.16, pp. 2817-2821, doi: 10.1016/j.jbiomech.2012.08.036, 2012.
- [9] J. T. Choi et al., “Walking flexibility after hemispherectomy: Split-belt treadmill adaptation and feedback control,” Brain, Vol.132, No.3, pp. 722-733, doi: 10.1093/brain/awn333, 2009.
- [10] E. V. L. Vasudevan and A. J. Bastian, “Split-belt treadmill adaptation shows different functional networks for fast and slow human walking,” J. Neurophysiol., Vol.103, No.1, pp. 183-191, doi: 10.1152/jn.00501.2009, 2010.
- [11] D. S. Reisman et al., “Split-belt treadmill adaptation transfers to overground walking in persons poststroke,” Neurorehab. Neural Repair, Vol.23, No.7, pp. 735-744, doi: 10.1177/1545968309332880, 2009.
- [12] F. Mawase et al., “Kinetic adaptation during locomotion on a split-belt treadmill,” J. Neurophysiol., Vol.109, No.8, pp. 2216-2227, doi: 10.1152/jn.00938.2012, 2013.
- [13] B. P. Selgrade et al., “Two biomechanical strategies for locomotor adaptation to split-belt treadmill walking in subjects with and without transtibial amputation,” J. Biomech., Vol.53, pp. 136-143, doi: 10.1016/j.jbiomech.2017.01.012, 2017.
- [14] D. S. Reisman et al., “Locomotor adaptation on a split-belt treadmill can improve walking symmetry post-stroke,” Brain, Vol.130, No.7, pp. 1861-1872, doi: 10.1093/brain/awm035, 2007.
- [15] E. E. Helm and D. S. Reisman, “The Split-belt walking paradigm: Exploring motor learning and spatiotemporal asymmetry post-stroke,” Phys. Med. Rehabil. Clin. N. Am., Vol.26, No.4, p. 703-713, doi: 10.1016/j.pmr.2015.06.010, 2015.
- [16] D. S. Reisman et al., “Repeated split-belt treadmill training improves poststroke step length asymmetry,” Neurorehab. Neural Repair, Vol.27, No.5, pp. 460-468, doi: 10.1177/1545968312474118, 2013.
- [17] J. Stenum and J. T. Choi, “Step time asymmetry but not step length asymmetry is adapted to optimize energy cost of split-belt treadmill walking,” J. Physiol., Vol.598, No.18, pp. 4063-4078, doi: 10.1113/JP279195, 2020.
- [18] D. Owaki and A. Ishiguro, “Mechanical Dynamics That Enables Stable Passive Dynamic Bipedal Running – Enhancing Self-Stability by Exploiting Nonlinearity in the Leg Elasticity –,” J. Robot. Mechatron., Vol.19, No.4, pp. 374-380, doi: 10.20965/jrm.2007.p0374, 2007.
- [19] Y. Sugimoto and K. Osuka, “Hierarchical Implicit Feedback Structure in Passive Dynamic Walking,” J. Robot. Mechatron., Vol.20, No.4, pp. 559-566, doi: 10.20965/jrm.2008.p0559, 2008.
- [20] K. Osuka et al., “Centipede Type Robot i-CentiPot: From Machine to Creatures,” J. Robot. Mechatron., Vol.31, No.5, pp. 723-726, doi: 10.20965/jrm.2019.p0723, 2019.
- [21] F. Ruppert and A. Badri-Spröwitz, “Series elastic behavior of biarticular muscle-tendon structure in a robotic leg,” Front. Neurorobotics, Vol.13, p. 64, doi: 10.3389/fnbot.2019.00064, 2019.
- [22] K. Endo and H. Herr, “A model of muscle-tendon function in human walking,” IEEE Int. Conf. on Robot. and Autom (ICRA), 2009.
- [23] A. Spröwitz et al., “Scalable pneumatic and tendon driven robotic joint inspired by jumping spiders,” IEEE Int. Conf. on Robot. and Autom. (ICRA), 2017.
- [24] R. Sato et al., “Design and control of robot legs with bi-articular muscle-tendon complex,” IEEE Int. Conf. on Robot. and Biomimetics (ROBIO), 2017.
- [25] S. Hiasa et al., “A legged robot with thigh bi-articular muscle-tendon complex,” IEEE Access, Vol.9, pp. 62285-62297, doi: 10.1109/ACCESS.2021.3074322, 2021.
- [26] Y.-L. Park et al., “Design and control of a bio-inspired soft wearable robotic device for ankle-foot rehabilitation,” Bioinspir. Biomim., Vol.9, No.1, 016007, doi: 10.1088/1748-3182/9/1/016007, 2014.
- [27] R. Niiyama et al., “Mowgli: A bipedal jumping and landing robot with an artificial musculoskeletal system,” Proc. IEEE Int. Conf. on Robot. and Autom. (ICRA), 2007.
- [28] G. Palli, “Model and Control of Tendon Actuated Robots,” Ph.D. Thesis, University of Bologna, 2007.
- [29] T. Lens and O. Von Stryk, “Investigation of Safety in Human-Robot-Interaction for a Series Elastic, Tendon-Driven Robot Arm,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2012.
- [30] T. Lens and O. von Stryk, “Design and dynamics model of a lightweight series elastic tendon-driven robot arm,” IEEE Int. Conf. on Robot. and Autom. (ICRA), 2013.
- [31] N. Kastor et al., “Design and manufacturing of tendon-driven soft foam robots,” Robotica, Vol.38, No.1, pp. 88-105, doi: 10.1017/S0263574719000481, 2020.
- [32] C. Schlagenhauf et al., “Control of tendon-driven soft foam robot hands,” IEEE-RAS 18th Int. Conf. on Humanoid Robots (Humanoids), 2018.
- [33] T. Kato et al., “Tendon-driven continuum robot for endoscopic surgery: Preclinical development and validation of a tension propagation model,” IEEE ASME Trans. Mechatron., Vol.20, No.5, pp. 2252-2263, doi: 10.1109/TMECH.2014.2372635, 2015.
- [34] A. Marjaninejad et al., “Autonomous functional movements in a tendon-driven limb via limited experience,” Nat. Mach. Intell., Vol.1, No.3, pp. 144-154, doi: 10.1038/s42256-019-0029-0, 2019.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.