Paper:
Design and Experimental Evaluation of a Data-Oriented Generalized Predictive PID Controller
Zhe Guan*, Shin Wakitani**, and Toru Yamamoto**
*Graduate School of Engineering, Hiroshima University
1-4-1 Kagamiyama, Higashi-Hiroshima, Hiroshima 739-8527, Japan
**Institute of Engineering, Hiroshima University
1-4-1 Kagamiyama, Higashi-Hiroshima, Hiroshima 739-8527, Japan

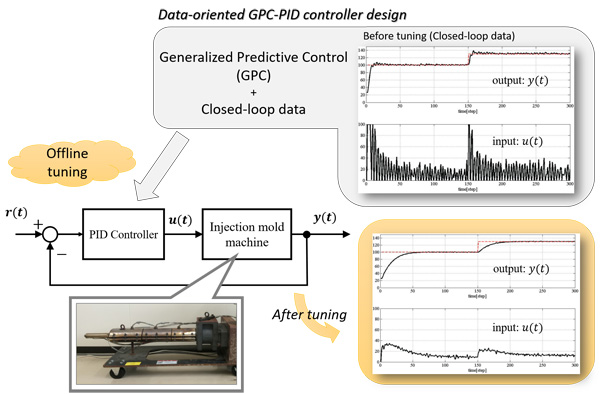
Schematic figure of data-oriented GPC-PID controller
- [1] K. J. Åström and T. Hägglund, “The future of PID control,” Control Engineering Practice, Vol.9, pp. 1163-1175, 2001.
- [2] K. J. Åström and T. Hägglund, “PID Controllers: Theory, Design, and Tuning – 2nd edition,” Instrument Society of America, 1995.
- [3] T. Yamamoto, A. Inoue, and S. L. Shah, “Generalized Minimum Variance Self-Tuning Pole-Assignment Controller with a PID structure,” Proc. of the 1999 IEEE Int. Conf. on Control Applications, Hawaii, USA, pp. 125-130, 1999.
- [4] J. G. Ziegler and N. B. Nichols, “Optimum Settings for Automatic Controllers,” Trans. of the ASME, Vol.64, pp. 759-768, 1942.
- [5] K. L. Chien, J. A. Hrones, and J. B. Reswick, “On the automatic control of generalized passive systems,” Trans. of the ASME, Vol.74, No.2, pp. 175-185, 1952.
- [6] I. L. Chien and P. S. Fruehauf, “Consider IMC tuning to improve controller performance,” Chemical Engineering Progress, Vol.86, No.10, pp. 33-41, 1990.
- [7] J. Bo, Q. G. Wang, and T. H. Lee, “PI/PID controller tuning via LQR approach,” Chemical Engineering Science, Vol.55, pp. 2429-2439, 2000.
- [8] Z. S. Hou and Z. Wang, “From model-based control to data-driven control: Survey, classification and perspective,” Information Sciences, Vol.235, pp. 3-35, 2013.
- [9] S. Khadraoui, H. Nounou, M. Nounou, A. Datta, and S. P. Bhattacharyya, “A model-free design of reduced-order controllers and application to a DC servomotor,” Automatica, Vol.50, pp. 2142-2149, 2014.
- [10] M. C. Campi, A. Lecchini, and S. M. Savaresi, “Virtual Reference Feedback Tuning (VRFT): a new direct approach to the design of feedback controllers,” Proc. of the 39th IEEE Conf. on Decision and Control, Sydney, Australia, Vol.1, pp. 623-629, 2000.
- [11] S. Wakitani, S. Hanata, and T. Yamamoto, “Design and Application of a Direct GMV-Based PID Controller,” Proc. of the 2012 Int. Conf. on Advanced Mechatronic Systems, Tokyo, Japan, pp. 541-546, 2012.
- [12] E. F. Camacho and C. Bordons, “Model Predictive Control in the process industry,” Springer, 1995.
- [13] S. Wakitani, Z. Guan, and T. Yamamoto, “Design of a Data-oriented GPC-PID Controller based on Closed-loop Data,” The Institute of System Control and Information Engineers, Vol.28, No.8, pp. 350-355, 2015 (in Japanese).
- [14] D. W. Clarke, C. Mohtadi, and P. S. Tuffs, “Generalized Predictive Control – Part I. The basis algorithm,” Automatica, Vol.23, No.2, pp. 137-148, 1987.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.