Paper:
Performance-Driven Adaptive Output Feedback Control with Direct Design of PFC
Taro Takagi*, Ikuro Mizumoto**, and Junpei Tsunematsu***
*Department of Control Engineering, National Institute of Technology, Maizuru College
234 Shiroya, Maizuru, Kyoto 625-8511, Japan
**Department of Intelligent Mechanical Systems, Kumamoto University
2-39-1 Kurokami, Kumamoto 860-8555, Japan
***Department of Mechanical System Engineering, Kumamoto University
2-39-1 Kurokami, Kumamoto 860-8511, Japan

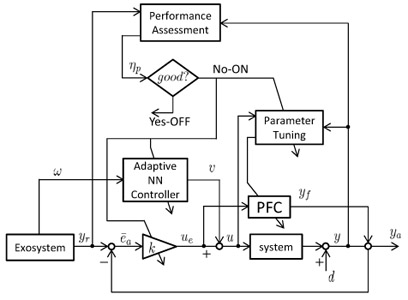 Block diagram of proposed control
Block diagram of proposed control- [1] H. Kaufman, I. Barkana, and K. Sobel, “Direct Adaptive Control Algorithms 2nd Ed.,” Springer, 1997.
- [2] F. Allgower, J. Ashman, and A. Ilchmann, “High-gain adaptive λ-tracking for nonlinear systems,” Automatica, Vol.33, No.5, pp. 881-888, 1997.
- [3] I. Mizumoto, D. Ikeda, T. Hirahata, and Z. Iwai, “Design of discrete time adaptive PID control systems with parallel feedforward compensator,” Control Engineering Practice, Vol.18, pp. 168-176, 2010.
- [4] K. Sato, K. Watanabe, M. Oya, and T. Kobayashi, “Simple Adaptive Control of Systems with Bounded Nonlinear Disturbances,” J. of Robotics and Mechatronics, Vol.10, No.2, 1998.
- [5] I. Mizumoto and Z. Iwai, “Simplified Adaptive Model Output Following Control for Plants with Unmodelled Dynamics,” Int. J. of Control, Vol.64, No. 1, pp. 61-80, 1996.
- [6] S. Shah, Z. Iwai, I. Mizumoto, and M. Deng, “Simple Adaptive Control of Processes with Time-delay,” J. of Process Control, Vol.7, No.6, pp. 439-449, 1997.
- [7] Z. Iwai and I. Mizumoto, “Realization of Simple Adaptive Control by Using Parallel Feedforward Compensator,” Int. J. of Control, Vol.59, No.6, pp. 1543-1565, 1994.
- [8] I. Mizumoto and H. Tanaka, “Model Free Design of Parallel Feedforward Compensator for Adaptive Output Feedback Control via FRIT with T-S Fuzzy Like Model,” Proc. of ALCOSP 2010, Turkey, August, CD-ROM, 45_34_A, 2010.
- [9] I. Mizumoto and H. Tanaka, “Model Free Design of PFC for Adaptive Output Feedback Control and Application to a Control of Magnetic Levitation System,” Proc. of 2010 IEEE CCA: Part of 2010 IEEE Multi-Conference on Systems and Control, Yokohama, Japan, September, pp. 35-40, 2010.
- [10] S. Soma, O. Kaneko, and T. Fujii, “A New Approach to Parameter Tuning of Controllers by Using One-Shot Experimental Data – A Proposal of Fictitious Reference Iterative Tuning –,” J. of Systems, Control and Information, Vol.17, No,12, pp. 528-536, 2010 (in Japanese).
- [11] S. Masuda, M. Kano, Y. Yasuda, and G. D. Li, “A Fictitious Reference Iterative Tuning Method with Simultaneous Delay Parameter Tuning of the Reference Model,” Int. J. of Innovative Computing, Information and Control, Vol.6, No.8, pp. 1-13, 2010.
- [12] I. Mizumoto, T. Takagi, S. Fukui, and K. Yamanaka, “Performance-driven adaptive output feedback control system with a PFC designed via FRIT approach,” Int. J. Advanced Mechatronic Systems, Vol.4, Nos.3/4, pp. 149-158, 2012.
- [13] I. Mizumoto and T. Takagi, “Performance-driven adaptive control system design with a PFC designed by system’s input/output data,” Proc. of IFAC workshop on ALCOSP 2013, France, 2013.
- [14] I. Mizumoto and Z. Iwai, “Simplified Adaptive Model Output Following Control for Plants with Unmodelled Dynamics,” Int. J. of Control, Vol.64, No. 1, pp. 61-80, 1997.
- [15] A. L. Fradkov, “Shunt output feedback adaptive controller for nonlinear plants,” Proc. of 13th IFAC World Congress, pp. 367-372, 1996.
- [16] I. Mizumoto, Y. Okamatsu, H. Tanaka, and Z. Iwai, “Output Regulation of Nonlinear Systems based on Adaptive Output Feedback with Adaptive NN Feedforward Control,” Int. J. of Innovative Computing, Information and Control, Vol.5, No.10, pp. 3527-3539, 2009.
- [17] G. Tao, “Adaptive Control Design and Analysis,” John Wiley & Sons, Inc., New Jersey, 2003.
- [18] T. J. Harris, “Assessment of closed loop performance,” The Canadian J. of Chemical Engineering, Vol.67, pp. 856-861, 1989.
- [19] B. Huang and S. L. Shah, “Performance Assessment of Control Loops: Theory and Applications,” Springer, London, 1999.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.