Paper:
Accurate Localization for Making Maps to Mobile Robots Using Odometry and GPS Without Scan-Matching
Masashi Yokozuka and Osamu Matsumoto
National Institute of Advanced Industrial Science and Technology (AIST)
1-1-1 Umezono, Tsukuba, Ibaraki 305-8568, Japan

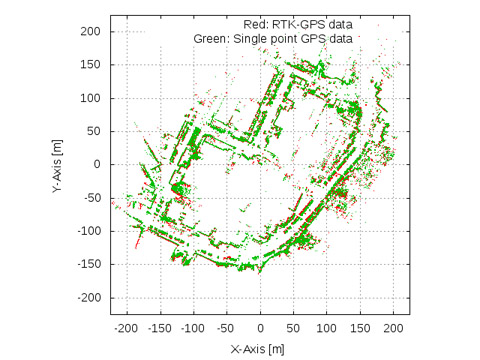 Comparison of mapping results
Comparison of mapping results- [1] G. Klein and D. Murray, “Parallel Tracking and Mapping for Small AR Workspaces,” Proc. of Int. Symposium on Mixed and Augmented Reality, 2007.
- [2] N. Snavely, S, M. Seitz, and R. Szeliski, “Photo Tourism: Exploring image collections in 3D,” ACM Trans. on Graphics (Proc. of SIGGRAPH 2006), 2006.
- [3] N. Snavely, S, M. Seitz, and R. Szeliski, “Modeling the World from Internet Photo Collections,” Int. J. of Computer Vision, 2007.
- [4] F. Luand and E. Milios, “Globally consistent range scan alignment for environment mapping,” Autonomous Robots, Vol.4, pp. 333-349, 1997.
- [5] S. Thrun, W. Burgard, and D. Fox, “Probabilistic Robotics,” The MIT Press, 2005.
- [6] G. Sibley, C. Mei, I. Reid, and P. Newman, “Sparser Relative Bundle Adjustment (SRBA): constant-time maintenance and local optimization of arbitrarily large maps,” Proc. of Int. Conf. on Robotics and Automation, 2013.
- [7] V. Indelman, R. Roberts, C. Beall, and F. Dellaert, “Incremental Light Bundle Adjustment,” Proc. of British Machine Vision Conf., 2012.
- [8] A. L. Rodrlguez, P. E. Lopez-de-Teruel, and A. Ruiz, “GEA Optimization for Live Structureless Motion Estimation,” Proc. of Int. Conf. on Computer Vision, 2011.
- [9] A. L. Rodrlguez, P. E. Lopez-de-Teruel, and A. Ruiz, “Reduced Epipolar Cost for Accelerated Incremental SfM,” Proc. of Int. Conf. on Computer Vision and Pattern Recognition, 2011.
- [10] J. Wang and E. Olson, “Robust Pose Graph Optimization Using Stochastic Gradient Descent,” Proc. of Int. Conf. on Robotics and Automation, 2014.
- [11] E. Olson, J. Leonard, and S. Teller, “Fast iterative optimization of pose graphs with poor initial estimates,” Proc. of Int. Conf. on Robotics and Automation, 2006.
- [12] B. Peasley and S. Birchfield, “Fast and Accurate PoseSLAM by Combining Relative and Global State Spaces,” Proc. of Int. Conf. on Robotics and Automation, 2014.
- [13] R. Kummerle, G. Grisetti, H. Strasdat, K. Konolige, and W. Burgard, “g2o: A general framework for graph optimization,” Proc. of Int. Conf. on Robotics and Automation, 2011.
- [14] K. Konolige, G. Grisetti, R. Kummerle, W. Burgard, B. Limketkai, and R. Vincent, “Sparse pose adjustment for 2D mapping,” Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2010.
- [15] N. Akai, K. Inoue, and K. Ozaki, “Autonomous Navigation Based on Magnetic and Geometric Landmarks on Environmental Structure in Real World,” J. of Robotics and Mechatronics, Vol.26, No.2, 2014.
- [16] S. Rahok, H. Oneda, A. Tanaka, and K. Ozaki, “A Robot Navigation Method for Mobile Robots in Real-World Environment,” J. of Robotics and Mechatronics, Vol.26, No.2, 2014.
- [17] S. Muramatsu, T. Tomizawa, S. Kudoh, and T. Suehiro, “Development of Intelligent Mobile Cart in a Crowded Environment – Robust Localization Technique with Unknown Objects –,” J. of Robotics and Mechatronics, Vol.26, No.2, 2014.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.