Research Paper:
Proposal and Design of a Mobile Robot-Restrained UAV Trainer
Daichi Arai†
 and Edwardo F. Fukushima
and Edwardo F. Fukushima
Graduate School of Engineering, Tokyo University of Technology
1404-1 Katakuramachi, Hachioji, Tokyo 192-0982, Japan
†Corresponding author

Unmanned aerial vehicles (UAVs), such as multicopter drones, are expected to play pivotal roles in varied domains. However, their operation poses challenges owing to the need for stringent safety measures and comprehensive training. This paper introduces a novel mobile robot-restrained UAV trainer to facilitate safe outdoor flight experiments and training sessions, which mitigates the risk of UAV crashes. The proposed system comprises three fundamental components: the UAV (flying object), a coupling-restraint mechanism, and a base platform. The base platform, which operates on the ground, is connected to the UAV via the coupling-restraint mechanism. This configuration allows the base platform to follow the movement of the UAV, thereby enabling training and experimental activities without concerns about potential UAV crashes. This paper outlines the system design, evaluates its impact on UAV motion through simulations, and presents a full-scale prototype for validation.
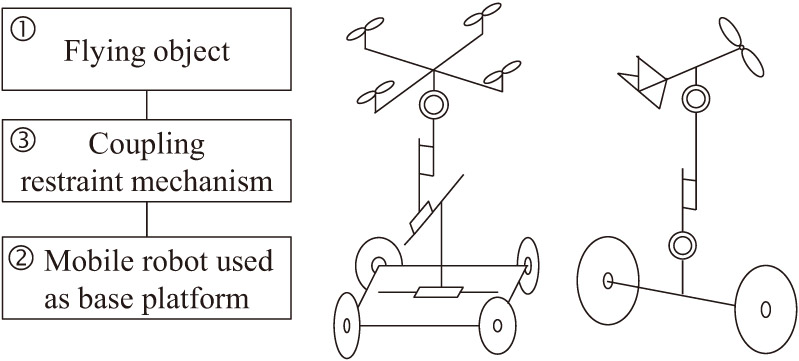
Conceptual diagram and sample configurations
- [1] M. Chiba, “Laws and knowledge of using drones in farm work,” Japanese J. of Farm Work Research, Vol.56, No.2, pp. 129-1323, 2021 (in Japanese). https://doi.org/10.4035/jsfwr.56.129
- [2] G. Kim, H. Park, and X. Zhang, “A method on using drone for connecting messenger lines in power transmission line construction,” 2019 Int. Conf. on Information and Communication Technology Convergence (ICTC), pp. 731-736, 2019. https://doi.org/10.1109/ICTC46691.2019.8939933
- [3] Y. Li and C. Liu, “Applications of multirotor drone technologies in construction management,” Int. J. of Construction Management, Vol.19, No.5, pp. 401-412, 2018. https://doi.org/10.1080/15623599.2018.1452101
- [4] C. Isozaki, T. Ishihara, K. Miura, S. Akitomi, S. Watabe, S. Aoki, and Y. Yamamoto, “An evaluation of disaster relief methods and hypothetical drills utilizing drones,” Japanese J. of Disaster Medicine, Vol.29, No.2, pp. 110-117, 2024 (in Japanese). https://doi.org/10.51028/jjdisatmed.29.2_110
- [5] D. Shoji and K. Shimizu, “The use and needs of a drone in the rescue activities at the landslide disaster,” J. of The Society of Instrument and Control Engineers, Vol.59, No.7, pp. 465-470, 2020 (in Japanese). https://doi.org/10.11499/sicejl.59.465
- [6] H. Shakhatreh et al., “Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges,” IEEE Access, Vol.7, pp. 48572-48634, 2019. https://doi.org/10.1109/ACCESS.2019.2909530
- [7] R. Tariq, M. Rahim, N. Aslam, N. Bawany, and U. Faseeha, “DronAID: A smart human detection drone for rescue,” 2018 15th Int. Conf. on Smart Cities: Improving Quality of Life Using ICT & IoT (HONET-ICT), pp. 33-37, 2018. https://doi.org/10.1109/HONET.2018.8551326
- [8] P. Daponte, L. De Vito, F. Lamonaca, F. Picariello, S. Rapuano, and M. Riccio, “Measurement science and education in the drone times,” IEEE Int. Instrumentation and Measurement Technology Conf. (I2MTC), 2017. https://doi.org/10.1109/I2MTC.2017.7969979
- [9] G. Shi et al., “Neural lander: Stable drone landing control using learned dynamics,” Int. Conf. on Robotics and Automation (ICRA), pp. 9784-9790, 2019. https://doi.org/10.1109/ICRA.2019.8794351
- [10] P. A. Filatenkov, T. A. Sergun, A. A. Vinokurov, and E. V. Morozova, “The main technical problems of unmanned aerial vehicles on the example of multicopters,” IEEE Conf. of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), pp. 500-504, 2019. https://doi.org/10.1109/EIConRus.2019.8656812
- [11] Q. Quan, R. Fu, and K. Y. Cai, “Practical control for multicopters to avoid non-cooperative moving obstacles,” IEEE Trans. on Intelligent Transportation Systems, Vol.23, No.8, pp. 10839-10857, 2022. https://doi.org/10.1109/TITS.2021.3096558
- [12] H. C. Reyes, C. T. Espinoza, C. A. Mercado, and J. M. Arteaga, “Training of drone pilots through virtual reality environments under the gamification approach in a university context,” Interaction Design and Architecture(s) Interaction Design & Architecture(s), Vol.49, pp. 64-83, 2021. https://doi.org/10.55612/s-5002-049-004
- [13] F. Zhang, M. Fu, L. Liu, C. Wei, and C. Yin, “Platform design and test analysis for UAV flight inspection and testing,” 2016 4th Int. Conf. on Applied Robotics for the Power Industry (CARPI), 2016. https://doi.org/10.1109/CARPI.2016.7745627
- [14] M. F. Santos et al., “Experimental validation of quadrotors angular stability in a gyroscopic test bench,” 2018 22nd Int. Conf. on System Theory, Control and Computing (ICSTCC), pp. 783-788, 2018. https://doi.org/10.1109/ICSTCC.2018.8540660
- [15] S. Jatsun, O. Emelyanova, and A. S. Martinez Leon, “Design of an Experimental Test Bench for a UAV Type Convertiplane,” IOP Conf. Series: Materials Science and Engineering, Vol.714, Article No.012009, 2020. https://doi.org/10.1088/1757-899X/714/1/012009
- [16] K. Pütsep, A. Rassõlkin, and T. Vaimann, “Conceptual test bench for small class unmanned autonomous vehicle performance estimation,” 2021 IEEE 19th Int. Power Electronics and Motion Control Conf. (PEMC), pp. 695-698, 2021. https://doi.org/10.1109/PEMC48073.2021.9432509
- [17] L. Nanu and P. Gili, “Novel test-bench for UAV inertia measurement employing direct-drive motors,” 2024 11th Int. Workshop on Metrology for AeroSpace (MetroAeroSpace), pp. 243-248, 2024. https://doi.org/10.1109/MetroAeroSpace61015.2024.10591543
- [18] B. S. Akbudak, M. Yıldırım, Ş. Cihat, and M. S. Ayas, “Design and implementation of a quadrotor test-bench for control algorithm analysis,” 2024 Innovations in Intelligent Systems and Applications Conf. (ASYU), 2024. https://doi.org/10.1109/ASYU62119.2024.10756997
- [19] Y. Maeda, K. Sano, E. Cooper, and K. Kamei, “Operation skill acquisition and fuzzy-rule extraction for drone control based on visual information using deep learning,” J. Adv. Comput. Intell. Intell. Inform., Vol.24, No.3, pp. 386-395, 2020. https://doi.org/10.20965/jaciii.2020.p0386
- [20] Z. Szőke, P. Lipovský, and R. Jalovecký, “Concept of improved UAV pilots training,” 2023 New Trends in Aviation Development (NTAD), pp. 242-246, 2023. https://doi.org/10.1109/NTAD61230.2023.10380159
- [21] D. Arai and E. F. Fukushima, “Proposal of robot-restrained UAV trainer,” The Joint Int. Conf. of The 5th AGILEHAND Plenary Meeting & 2024 IEEE/CAA J. of Automatica Sinica Conf. (APM&JAS2024), pp. 115-119, 2024.
- [22] D. Arai and E. F. Fukushima, “Proposal for a link-joint-connected omni-directional moving point-constrained flying object trainer,” Proc. of the 2024 Annual Conf. on System Integration, The Society of Instrument and Control Engineers (SI2024), pp. 895-897, 2024 (in Japanese).
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.