Research Paper:
Auction-Based Algorithm for the Forest Firefighting Coalition Formation Problem
Sili Yang
 , Jia Zhang†
, and Ruotong Wu
, Jia Zhang†
, and Ruotong Wu
Beijing Institute of Technology
No.5 South Street, Zhongguancun, Haidian District, Beijing 100081, China
†Corresponding author

Forest fires are among the most frequent, intractable, and destructive natural disasters worldwide, inflicting profound ecological damage and posing grave threats to human life and property. To improve the autonomous decision making capabilities of unmanned intelligent systems in emergency rescue operations, this paper presents a mathematical model for coalition formation among heterogeneous firefighting resources. By implementing an optimized coalition structure, we streamline large scale organization and scheduling, accelerate analysis and decision making processes, and achieve the effective allocation of personnel, equipment, information, and other critical assets. Leveraging both Dutch and British auction mechanisms, we develop a multi round auction algorithm tailored to the diverse objectives and capabilities of intelligent agents within extensive forest firefighting scenarios, thereby improving task completion efficiency and resource utilization. Comparative simulation results demonstrate that our algorithm surpasses existing methods in metrics such as fire containment area, coalition stability, and overall response effectiveness. The methodology presented herein carries considerable practical significance: although designed for forest fire prevention and response, its underlying coalition formation and auction based resource allocation framework is readily generalizable to a range of large scale, complex task environments—such as industrial manufacturing, disaster relief, transportation logistics, and military operations—thereby furnishing a versatile paradigm for efficient system resource scheduling.
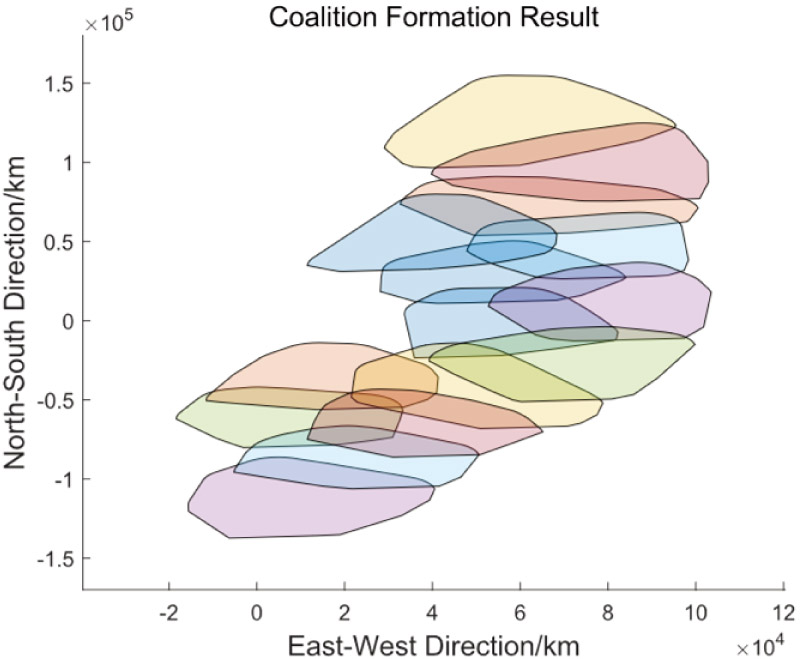
Simulation results for strip forest
- [1] C. Chen, X. Wu, J. Chen et al., “Dynamic grouping of heterogeneous agents for exploration and strike missions,” Frontiers of Information Technology & Electronic Engineering, Vol.23, pp. 86-100, 2022. https://doi.org/10.1631/FITEE.2000352
- [2] C. Zhang, B. Hu, and F. Yan, “Multiple UAVs forest fire fighting using a hierarchical task planning method,” 2021 2nd Int. Conf. on Electronics, Communications and Information Technology (CECIT), pp. 760-765, 2021. https://doi.org/10.1109/CECIT53797.2021.00138
- [3] Y. Sklab, S. Aknine, and H. Ariouat, “Selective exploration algorithm for coalition formation,” Procedia Computer Science, Vo.225, pp. 851-860, 2023. https://doi.org/10.1016/j.procs.2023.10.072
- [4] L. Ruan, G. Li, W. Dai et al., “Cooperative relative localization for UAV swarm in GNSS-denied environment: A coalition formation game approach,” IEEE Internet of Things J., Vol.9, No.13, pp. 11560-11577, 2022. https://doi.org/10.1109/JIOT.2021.3130000
- [5] M. Guo, B. Xin, J. Chen, and Y. Wang, “Multi-agent coalition formation by an efficient genetic algorithm with heuristic initialization and repair strategy,” Swarm and Evolutionary Computation, Vol.55, Article No.100686, 2020. https://doi.org/10.1016/j.swevo.2020.100686
- [6] J. Guerrero, G. Oliver, and O. Valero, “Multi-robot coalitions formation with deadlines: Complexity analysis and solutions,” PloS One, Vol.12, No.1, Article No.e0170659, 2017. https://doi.org/10.1371/journal.pone.0170659
- [7] S. Sarkar, M. C. Malta, and A. Dutta, “A survey on applications of coalition formation in multi-agent systems,” Concurrency and Computation: Practice and Experience, Vol.34, No.11, Article No.e6876, 2022. https://doi.org/10.1002/cpe.6876
- [8] S. Li, P. Zheng, S. Pang et al., “Self-organising multiple human–robot collaboration: A temporal subgraph reasoning-based method,” J. of Manufacturing Systems, Vol.68, pp. 304-312, 2023. https://doi.org/10.1016/j.jmsy.2023.03.013
- [9] S. Wu, X. Liu, X. Wang et al., “Multi-robot dynamic task allocation based on improved auction algorithm,” 2021 6th Int. Conf. on Automation, Control and Robotics Engineering (CACRE), pp. 57-61, 2021. https://doi.org/10.1109/CACRE52464.2021.9501305
- [10] S. Wang, Y. Heng, Y. Hua et al., “Improved auction algorithm for weapon target assignment with firepower-health model,” 2023 42nd Chinese Control Conf. (CCC), pp. 5823-5828, 2023. https://doi.org/10.23919/CCC58697.2023.10240073
- [11] R. Mingqiu, L. Junkai, and S. Ben, “Adaptive task scheduling and resources allocation based on auction algorithm,” 2021 13th Int. Conf. on Intelligent Human-Machine Systems and Cybernetics (IHMSC), pp. 196-199, 2021. https://doi.org/10.1109/IHMSC52134.2021.00052
- [12] Y. Wang, H. Li, and Y. Yao, “An adaptive distributed auction algorithm and its application to multi-AUV task assignment,” Science China Technological Sciences, Vol.66, pp. 1235-1244, 2023. https://doi.org/10.1007/s11431-022-2302-6
- [13] Z. Chen, J. Li, C. Liu et al., “Task assignment of UAV swarms based on auction algorithm in poor communication environments,” J. Adv. Comput. Intell. Intell. Inform., Vol.27, No.6, pp. 1142-1150, 2023. https://doi.org/10.20965/jaciii.2023.p1142
- [14] M. Braquet and E. Bakolas, “Greedy decentralized auction-based task allocation for multi-agent systems,” IFAC-PapersOnLine, Vol.54, No.20, pp. 675-680, 2021. https://doi.org/10.1016/j.ifacol.2021.11.249
- [15] R. Jin and J. Su, “Self-organizing coalition formation based on non-cooperative games in social networks,” 2022 Int. Conf. on Information Technology, Communication Ecosystem and Management (ITCEM), pp. 90-94, 2022. https://doi.org/10.1109/ITCEM57303.2022.00026
- [16] G. Sofia, R. G. Panagiotis, L. Thomas et al., “Leveraging the power of internet of things and artificial intelligence in forest fire prevention, detection, and restoration: A comprehensive survey,” Internet of Things, Vol.26, Article No.101171, 2024. https://doi.org/10.1016/j.iot.2024.101171
- [17] O. Shehory and S. Kraus, “Methods for task allocation via agent coalition formation,” Artificial Intelligence, Vol.101, Nos.1-2, pp. 165-200, 1998. https://doi.org/10.1016/S0004-3702(98)00045-9
- [18] T. Nishimura, A. Okada, and Y. Shirata, “Evolution of fairness and coalition formation in three-person ultimatum games,” J. of Theoretical Biology, Vol.420, pp. 53-67, 2017. https://doi.org/10.1016/j.jtbi.2017.02.033
- [19] Y. G. Qiang, G. B. Song, Y. Liu et al., “Dynamic air defense weapon target assignment based on auction algorithm,” Ordnance Industry Automation, Vol.42, pp. 50-54, 2023.
- [20] B. P. Gerkey and M. J. Matarić, “A formal analysis and taxonomy of task allocation in multi-robot systems,” The Int. J. of Robotics Research, Vol.23, No.9, pp. 939-954, 2004. https://doi.org/10.1177/0278364904045564
- [21] M. B. Dias, R. Zlot, N. Kalra et al., “Market-based multirobot coordination: A. survey and analysis,” Proc. of the IEEE, Vol.94, No.7, pp. 1257-1270, 2006. https://doi.org/10.1109/JPROC.2006.876939
- [22] A. H. C. Ramalho, E. F. da Silva, J. P. M. Silva et al., “Allocation of water reservoirs to fight forest fires according to the risk of occurrence,” J. of Environmental Management, Vol.296, Article No.113122, 2021. https://doi.org/10.1016/j.jenvman.2021.113122
- [23] W. Wang, L. Ru, B. Lu et al., “Multi-task cooperative assignment of two-stage heterogeneous multi-UAV based on improved CBBA,” 2023 3rd Int. Symp. on Computer Technology and Information Science (ISCTIS), pp. 173-178, 2023.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.