Research Paper:
Dynamic Sampling and Control for Automated Road Pre-Marking Robot
Meng Wang*1
 , Shiyun Zhu*2,†
, Juexuan Chen*2
, Yutong Lu*3
, Lang Zhu*4, and Xue Lv*1
, Shiyun Zhu*2,†
, Juexuan Chen*2
, Yutong Lu*3
, Lang Zhu*4, and Xue Lv*1
*1Changjiang Institute of Technology
No.9 Wenhua Avenue, Jiangxia District, Wuhan, Hubei 430212, China
*2Wuhan Goyu Intelligence Technology Co., Ltd.
No.1 Fenghuang Yuan 3rd Road, East Lake High-tech Development Zone, Wuhan, Hubei 430200, China
†Corresponding author
*3Department of Economics & Department of Statistics, University of Toronto
1080 Bay Street, Toronto, Ontario M, Canada
*4Roadiant (Suzhou) intelligent Technology Co., Ltd.
No.2266 Taiyang Road, Xiangcheng District, Suzhou, Jiangsu 215100, China

This study introduces a specialized pre-marking robotic system that boasts a high degree of autonomy in response to low efficiency and inaccuracy in pre-marking operations for road delineations on newly constructed roads. The system is designed for autonomous navigation and precise spray-painting of road markings. It employs dynamic point sampling technology, enabling continuous and real-time acquisition of road coordinate information, thereby significantly improving pre-marking efficiency. A three-point circle correction method is implemented to generate the robot’s target path that includes curvature information. A curvature-adaptive pure pursuit control strategy is executed to ensure high-precision tracking of the pre-marking robot along the target path. Simulation experiments have confirmed the effectiveness and reliability of the robotic system. Practical applications reveal a marking error of less than 1.5 cm in long curved road scenario and 2 cm in right-angle curve road scenario. This result achieves efficient and accurate pre-marking operations and provides substantial technical support for road construction and maintenance.
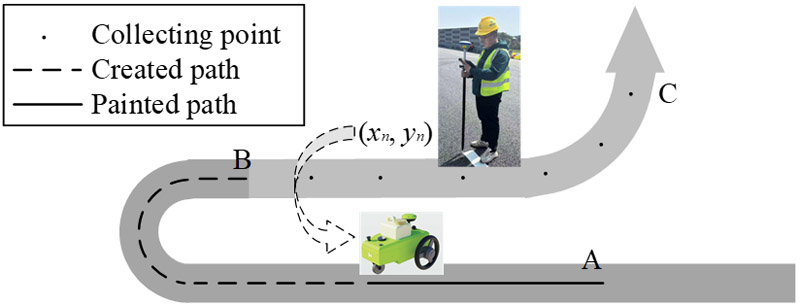
Manual sampling and robotic line drawing
- [1] A. Jayaraj and H. N. Divakar, “Robotics in construction industry,” IOP Conf. Series: Materials Science and Engineering, Vol.376, Article No.012114, 2018. https://doi.org/10.1088/1757-899X/376/1/012114
- [2] A. V. Reddy, K. Ganapathy, and H. Babu, “Design and assembling of a mobile controlled 2D printing road lane drawing robot for measuring speed and distance in comparison with rangoli robot,” 14th Int. Conf. on Mathematics, Actuarial Science, Computer Science and Statistics, 2022. https://doi.org/10.1109/MACS56771.2022.10022542
- [3] W. R. Nyemba, N. L. Shangwa, S. Chinguwa, and C. Mbohwa, “Conceptualization, development and design of a mortar spraying machine,” Procedia CIRP, Vol.91, pp. 396-401, 2020. https://doi.org/10.1016/j.procir.2020.03.105
- [4] Y. Zhou et al., “Building information modeling-based 3D reconstruction and coverage planning enabled automatic painting of interior walls using a novel painting robot in construction,” J. of Field Robotics, Vol.39, No.8, pp. 1178-1204, 2022. https://doi.org/10.1002/rob.22103
- [5] R. Dindorf and P. Wos, “Challenges of robotic technology in sustainable construction practice,” Sustainability, Vol.16, No.13, Article No.5500, 2024. https://doi.org/10.3390/su16135500
- [6] G. Long et al., “Machine-vision-based online self-optimizing control system for line marking machines,” Studies in Informatics and Control, Vol.32, No.2, pp. 93-104, 2023. https://doi.org/10.24846/v32i2y202309
- [7] D. Majstorović and F. Diermeyer, “Driverless road-marking machines: Ma(r)king the way towards the future of mobility,” 2022 IEEE Int. Conf. on Systems, Man, and Cybernetics, pp. 1297-1303, 2022. https://doi.org/10.1109/SMC53654.2022.9945440
- [8] M. A. H. Ali, W. A. B. W. Yusoff, Z. B. Hamedon, Z. B. M. Yussof, and M. Mailah, “Mechatronic design and development of an autonomous mobile robotics system for road marks painting,” 2016 IEEE Industrial Electronics and Applications Conf., pp. 336-341, 2016. https://doi.org/10.1109/IEACON.2016.8067401
- [9] M. A. H. Ali, M. Mailah, K. Moiduddin, W. Ameen, and H. Alkhalefah, “Development of an autonomous robotics platform for road marks painting using laser simulator and sensor fusion technique,” Robotica, Vol.39, No.3, pp. 535-556, 2021. https://doi.org/10.1017/S0263574720000831
- [10] M. Wang, P. Cui, and J. Chen, “Smoothing method with piecewise polynomial fitting for reference trajectory of autonomous driving,” Modern Electronics Technique, Vol.44, No.15, pp. 154-158, 2021 (in Chinese). https://doi.org/10.16652/j.issn.1004-373x.2021.15.031
- [11] M. Sejfried, “Perfect circles, amicable triangles – Extrema on quasi-main cevians and main cevians, quasi-bisectors and bisectors of the angle and poles,” Proc. of the 21st Int. Conf. on Geometry and Graphics, pp. 126-135, 2024. https://doi.org/10.1007/978-3-031-71225-8_11
- [12] B. Wang et al., “Multistep prediction analysis of pure pursuit method for automated guided vehicles in aircraft industry,” Actuators, Vol.13, No.12, Article No.518, 2024. https://doi.org/10.3390/act13120518
- [13] B. Li et al., “Adaptive pure pursuit: A real-time path planner using tracking controllers to plan safe and kinematically feasible paths,” IEEE Trans. on Intelligent Vehicles, Vol.8, No.9, pp. 4155-4168, 2023. https://doi.org/10.1109/TIV.2023.3296435
- [14] Q. Sun et al., “Path tracking control of wheeled mobile robot based on improved pure pursuit algorithm,” 2019 Chinese Automation Congress, pp. 4239-4244, 2019. https://doi.org/10.1109/CAC48633.2019.8997258
- [15] S. Kim, J. Lee, K. Han, and S. B. Choi, “Vehicle path tracking control using pure pursuit with MPC-based look-ahead distance optimization,” IEEE Trans. on Vehicular Technology, Vol.73, No.1, pp. 53-66, 2024. https://doi.org/10.1109/TVT.2023.3304427
- [16] M. Wang, X. Lv, J. Chen, and X. Su, “Improved pure pursuit algorithm based path tracking method for autonomous vehicle,” J. Adv. Comput. Intell. Intell. Inform., Vol.28, No.4, pp. 1034-1042, 2024. https://doi.org/10.20965/jaciii.2024.p1034
- [17] M. Bakirci, “Data-driven system identification of a modified differential drive mobile robot through on-plane motion tests,” Electrica, Vol.23, No.3, pp. 619-633, 2023. https://doi.org/10.5152/electrica.2023.22164
- [18] F. B. Romero, C. Gragnaniello, R. Marotta, and D. Pascarella, “Implementation of lateral and longitudinal control in Nebrija Autonomous Vehicle,” Advances in Italian Mechanism Science: Proc. of the 5th Int. Conf. of IFToMM Italy, Vol.2, pp. 247-254, 2024. https://doi.org/10.1007/978-3-031-64569-3_29
- [19] S. Macenski, S. Singh, F. Martín, and J. Ginés, “Regulated pure pursuit for robot path tracking,” Autonomous Robots, Vol.47, No.6, pp. 685-694, 2023. https://doi.org/10.1007/s10514-023-10097-6
- [20] E. Cocconi, “Enhanced pure pursuit algorithm & autonomous driving,” Bachelor’s thesis, University of New South Wales, 2019. https://doi.org/10.13140/RG.2.2.16776.44803/2
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.