Research Paper:
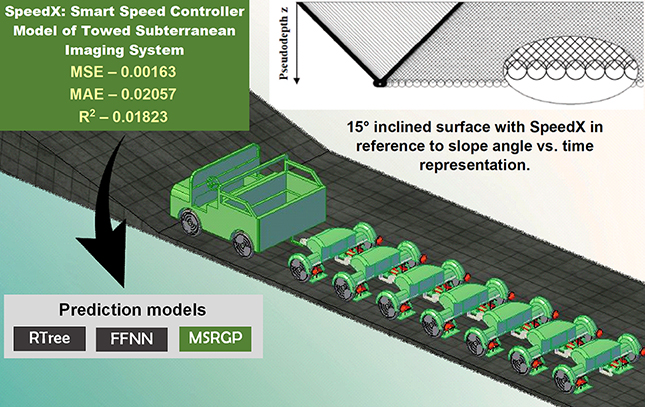
SpeedX: Smart Speed Controller Model of Towed Subterranean Imaging System for Resistivity Data Distortion Reduction Using Computational Intelligence
R-Jay S. Relano*,†, Kate G. Francisco*, Ronnie S. Concepcion II*, Mike Louie C. Enriquez*, Jonah Jahara G. Baun**, Adrian Genevie G. Janairo**, Ryan Rhay P. Vicerra*, Argel A. Bandala**, and Elmer P. Dadios*
*Department of Manufacturing Engineering and Management, De La Salle University (DLSU)
2401 Taft Avenue, Malate, Manila 1004, Philippines
**Department of Electronics and Computer Engineering, De La Salle University (DLSU)
2401 Taft Avenue, Malate, Manila 1004, Philippines
†Corresponding author

Land surveying has been one of the core operations in performing underground imaging. It is known that dynamic and continuous resistivity readings were employed through this technique using the array of capacitive electrodes being towed with a light vehicle. However, the main challenge in doing subsurface surveying is the change in speed of the system when there are inevitable obstacles and sloping road surfaces. To address it, this study will develop prediction models using different computational intelligence such as multigene symbolic regression genetic programming (MSRGP), regression-based decision tree (RTree), and feed forward neural network (FFNN) that will result in a smart speed controller system that can maintain the constant speed of the towed subterranean system. The best performing prediction model will be considered as the SpeedX. The expected output is a correction factor that will signal the speed controller in slow down or inclined plane road environment to maintain a constant speed of 1.6667 m/s for avoidance of data distortion on land surveying. Thus, the MSEs for MSRGP, FFNN, and RTree are 0.00163, 0.00178, and 0.00240, respectively. This results in MSRGP as the best performing model and was considered as the SpeedX model. Other evaluation metrics were employed such as the MAE and R2 which signify the advantage of SpeedX. Furthermore, the comparison between the CI-controlled and uncontrolled towed subterranean imaging trailer system, as well as its advantages clearly highlight the advantage of embedded SpeedX in the system.
SpeedX: The smart speed controller model
- [1] K. Francisco et al., “Analytical Hierarchical Process-Based Material Selection for Trailer Body Frame of an Underground Imaging System,” IEEE 13th Int. Conf. on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management (HNICEM), 2021. https://doi.org/10.1109/HNICEM54116.2021.9732048
- [2] M. L. Enriquez et al., “Prediction of Weld Current Using Deep Transfer Image Networks Based on Weld Signatures for Quality Control,” IEEE 13th Int. Conf. on HNICEM, 2021. https://doi.org/10.1109/HNICEM54116.2021.9731979
- [3] K. G. Francisco et al., “Systematic Analysis and Proposed AI-Based Technique for Attenuating Inductive and Capacitive Parasitics in Low and Very Low Frequency Antennas,” IEEE Int. IOT, Electronics and Mechatronics Conf. (IEMTRONICS), 2022. https://doi.org/10.1109/IEMTRONICS55184.2022.9795784
- [4] O. Kuras, “The Capacitive Resistivity Technique for Electrical Imaging of the Shallow Subsurface,” Ph.D. thesis, University of Nottingham, Loke M. H., 2002.
- [5] O. Kuras et al., “Capacitive Resistivity Imaging with Towed Arrays,” J. of Environmental and Engineering Geophysics, Vol.12, No.3, pp. 267-279, 2007. https://doi.org/10.2113/JEEG12.3.267
- [6] M. H. Khooban, “Hardware-in-the-loop simulation for the analyzing of smart speed control in highly nonlinear hybrid electric vehicle,” Trans. of the Institute of Measurement and Control, Vol.41, No.2, pp. 458-467, 2019. https://doi.org/10.1177/0142331218764784
- [7] M. A. George et al., “Electronically Tunable ACO Based Fuzzy FOPID Controller for Effective Speed Control of Electric Vehicle,” IEEE Access, Vol.9, pp. 73392-73412, 2021. https://doi.org/10.1109/ACCESS.2021.3080086
- [8] T. A. T. Mohd et al., “Mathematical modeling and simulation of an electric vehicle,” J. of Mechanical Engineering and Sciences, Vol.8, pp. 1312-1321, 2015. https://doi.org/10.15282/jmes.8.2015.6.0128
- [9] R. S. Concepcion II et al., “Aquaphotomics Determination of Total Organic Carbon and Hydrogen Biomarkers on Aquaponic Pond Water and Concentration Prediction Using Genetic Programming,” IEEE Region 10 Humanitarian Technology Conf. (R10-HTC), 2020. https://doi.org/10.1109/R10-HTC49770.2020.9357030
- [10] M. G. Palconit et al., “FishEye: A Centroid-Based Stereo Vision Fish Tracking Using Multigene Genetic Programming,” IEEE R10-HTC, 2021. https://doi.org/10.1109/R10-HTC53172.2021.9641654
- [11] A. G. Janairo et al., “Optimization of Subsurface Imaging Antenna Capacitance through Geometry Modeling Using Archimedes, Lichtenberg and Henry Gas Solubility Metaheuristics,” IEEE Int. IOT, Electronics and Mechatronics Conf. (IEMTRONICS), 2022. https://doi.org/10.1109/IEMTRONICS55184.2022.9795789
- [12] R. S. Concepcion II et al., “Non-destructive in situ measurement of aquaponic lettuce leaf photosynthetic pigments and nutrient concentration using hybrid genetic programming,” Agrivita, Vol.43, No.3, pp. 589-610, 2021. http://doi.org/10.17503/agrivita.v43i3.2961
- [13] R. S. Concepcion II et al., “Aquaphotomics determination of nutrient biomarker for spectrophotometric parameterization of crop growth primary macronutrients using genetic programming,” Information Processing in Agriculture, 2022. https://doi.org/10.1016/j.inpa.2021.12.007
- [14] O. J. Alajas et al., “Indirect Prediction of Aquaponic Water Nitrate Concentration Using Hybrid Genetic Algorithm and Recurrent Neural Network,” IEEE 13th Int. Conf. on HNICEM, 2021. https://doi.org/10.1109/HNICEM54116.2021.9731946
- [15] C. H. Mendigoria et al., “Seed Architectural Phenes Prediction and Variety Classification of Dry Beans (Phaseolus vulgaris) Using Machine Learning Algorithms,” IEEE R10-HTC, 2021. https://doi.org/10.1109/R10-HTC53172.2021.9641554
- [16] O. J. Alajas et al., “Prediction of Grape Leaf Black Rot Damaged Surface Percentage Using Hybrid Linear Discriminant Analysis and Decision Tree,” Int. Conf. on Intelligent Technologies (CONIT), 2021. https://doi.org/10.1109/CONIT51480.2021.9498518
- [17] N. Chowdhury and M. A. Kashem, “A Comparative Analysis of Feed-Forward Neural Network & Recurrent Neural Network to Detect Intrusion,” 5th Int. Conf. on Electrical and Computer Engineering, pp. 488-492, 2008.
- [18] S. Chaturvedi et al., “Review of handwritten pattern recognition of digits and special characters using feed forward neural network and izhikevich neural model,” Proc. Int. Conf. on Electronic Systems, Signal Processing, and Computing Technologies (ICESC), pp. 425-428, 2014. https://doi.org/10.1109/ICESC.2014.83
- [19] O. I. Olayode et al., “Application of Artificial Intelligence in Traffic Control System of Non-Autonomous Vehicles at Signalized Road Intersection,” Procedia CIRP, Vol.91, pp. 194-200, 2020. https://doi.org/10.1016/j.procir.2020.02.167
- [20] D. Naso and B. Turchiano, “Multicriteria meta-heuristics for AGV dispatching control based on computational intelligence,” IEEE Trans. on Systems, Man, and Cybernetics, Part B: Cybernetics, Vol.35, No.2, pp. 208-226, 2005. https://doi.org/10.1109/TSMCB.2004.842249
- [21] M. Pasin et al., “Computational Intelligence and Adaptation in VANETs: Current Research and New Perspectives,” Proc. Int. Joint Conf. on Neural Networks (IJCNN), 2018.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.