Paper:
A High-Precision Power Line Recognition and Location Method Based on Structured-Light Binocular Vision
Xu Jian*,†, Jinbin Li*, Xin Chen**,***, Xing-Ao Wang**,***, Jun Chen*, and Chuanqi Wu*
*Electric Power Research Institute, State Grid Hubei Electric Power Co., Ltd.
No.227 Xudong Street, Hongshan District, Wuhan 430077, China
**School of Automation, China University of Geosciences
No.388 Lumo Road, Hongshan District, Wuhan 430074, China
***Hubei Key Laboratory of Advanced Control and Intelligent Automation for Complex Systems
No.388 Lumo Road, Hongshan District, Wuhan 430074, China
†Corresponding author

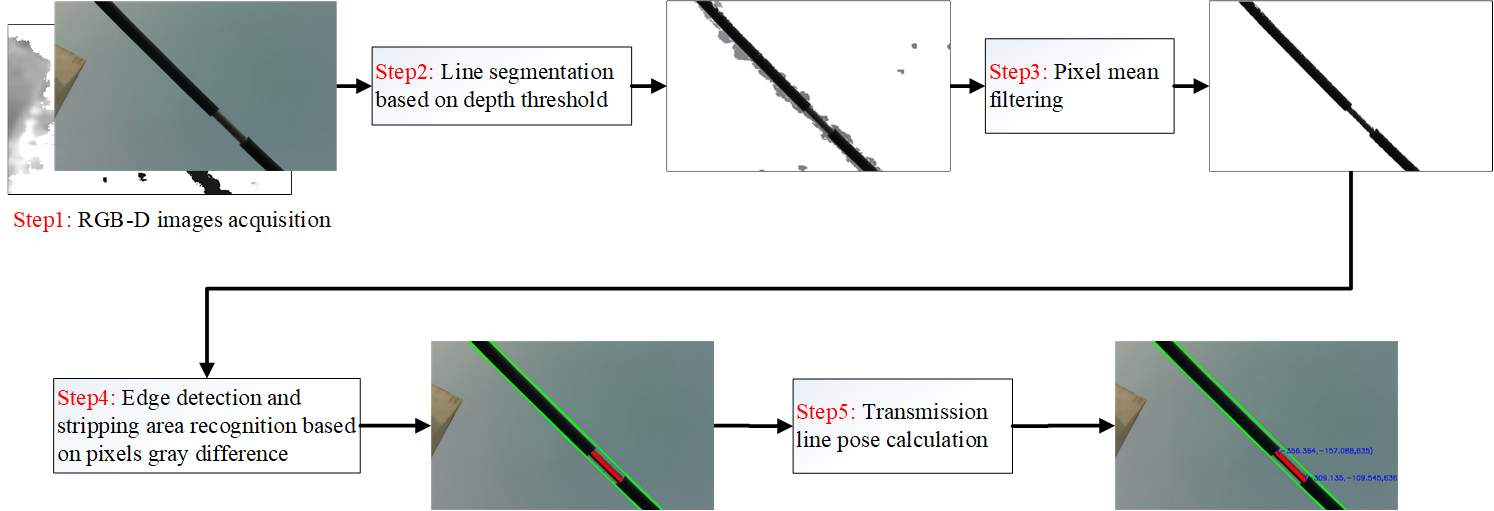
To complete the wiring operation of the main transmission line stripped of its insulating skin in a live power distribution system, a structured-light binocular vision method is utilized to identify and locate the line. First, aiming at the interference of the background information, a depth threshold segmentation method is used to filter the background area. Second, a mean filtering method is proposed to filter out the mismatch noise of a binocular vision camera in an outdoor environment. The Canny algorithm is then utilized to extract the contour, the central axis of the main transmission line is fitted, and the difference in the neighborhood pixel value is used to recognize the stripping area. Finally, the spatial equation and attitude of the central axis of the fitting transmission line are obtained along with the central coordinates of the stripping area, guiding the robot to carry out the wiring.
The power line positioning method
- [1] D. Fan, Z. Shao, L. Li, Y. Sun, H. Meng, and C. Zhao, “Research on the Intelligent Industrial Detection System for Distribution Network Equipment,” 2019 4th Int. Conf. on Control and Robotics Engineering (ICCRE), pp. 49-53, 2019.
- [2] D. Yan, H. Cao, T. Wang, R. Chen, and S. Xue, “Graph-Based Knowledge Acquisition with Convolutional Networks for Distribution Network Patrol Robots,” IEEE Trans. on Artificial Intelligence, Vol.2, No.5, pp. 384-393, 2021.
- [3] S. Gu, J. Zhou, and W. Shui, “3D Reconstruction for the Operating Environment of the Robots in Distribution Hot-Line Working Based on Mixed Reality,” 2021 IEEE Int. Conf. on Power, Intelligent Computing and Systems (ICPICS), pp. 548-552, 2021.
- [4] X. Hu, D. Zuo, X. Hou, W. Song, X. Zhou, H. Hu, J. Xu, and H. Liu, “Extraction of high voltage transmission lines based on morphological processing,” 2016 IEEE Int. Conf. on Information and Automation (ICIA), pp. 1001-1006, 2016.
- [5] Y. Chang, H. Yu, and L. Kong, “Study on the Calculation Method of Ice Thickness Calculation and Wire Extraction Based on Infrared Image,” 2018 IEEE Int. Conf. on Mechatronics and Automation (ICMA), pp. 381-386, 2018.
- [6] R. G. v. Gioi, J. Jakubowicz, J.-M. Morel, and G. Randall, “LSD: A Fast Line Segment Detector with a False Detection Control,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.32, No.4, pp. 722-732, 2010.
- [7] A. J. Mantau, A. Bowolaksono, B. Wiweko, and W. Jatmiko, “Detecting Ellipses in Embryo Images Using Arc Detection Method with Particle Swarm for Blastomere-Quality Measurement System,” J. Adv. Comput. Intell. Intell. Inform., Vol.20, No.7, pp. 1170-1180, 2016.
- [8] T. Fukukawa, K. Sekiyama, Y. Hasegawa, and T. Fukuda, “Vision-Based Mowing Boundary Detection Algorithm for an Autonomous Lawn Mower,” J. Adv. Comput. Intell. Intell. Inform., Vol.20, No.1, pp. 49-56, 2016.
- [9] J. Zhu, Y. Chen, Y. Wang, H. Zhang, X. Tang, M. Xu, and E. Dong, “Target Measurement Method Based on Sparse Disparity for Live Power Lines Maintaining Robot,” 2020 IEEE Int. Conf. on Real-Time Computing and Robotics (RCAR), pp. 416-420, 2020.
- [10] K. Hara and H. Saito, “Vehicle Localization Based on the Detection of Line Segments from Multi-Camera Images,” J. Robot. Mechatron., Vol.27, No.6, pp. 617-626, 2015.
- [11] S. Rong, L. He, L. Du, Z. Li, and S. Yu, “Intelligent Detection of Vegetation Encroachment of Power Lines with Advanced Stereovision,” IEEE Trans. on Power Delivery, Vol.36, No.6, pp. 3477-3485, 2021.
- [12] J. Yang and Z. Kang, “Voxel-Based Extraction of Transmission Lines from Airborne LiDAR Point Cloud Data,” IEEE J. of Selected Topics in Applied Earth Observations and Remote Sensing, Vol.11, No.10, pp. 3892-3904, 2018.
- [13] C. Nardinocchi, M. Balsi, and S. Esposito, “Fully Automatic Point Cloud Analysis for Powerline Corridor Mapping,” IEEE Trans. on Geoscience and Remote Sensing, Vol.58, No.12, pp. 8637-8648, 2020.
- [14] S. Xu and R. Wang, “Power Line Extraction from Mobile LiDAR Point Clouds,” IEEE J. of Selected Topics in Applied Earth Observations and Remote Sensing, Vol.12, No.2, pp. 734-743, 2019.
- [15] J. Zhang, G. Huang, X. Liu, C. Shan, W. Wang, Y. Tong, and M. Xu, “Precise Positioning for Live Working on Distribution Line,” Power System Technology, No.2, pp. 812-819, 2022 (in Chinese).
- [16] J. Canny, “A Computational Approach to Edge Detection,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.PAMI-8, No.6, pp. 679-698, 1986.
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.