Paper:
Disparity Optimization Algorithm for Stereo Matching Using Improved Guided Filter
Yanyan Xu, Xiangyang Xu, and Rui Yu
Beijing Institute of Technology
No.5 Zhong Guan Cun South Street, Haidian District, Beijing 100081, China

A disparity optimization algorithm based on an improved guided filter is proposed to smooth the disparity image. A well-known problem to local stereo matching is the low matching accuracy and staircase effect in regions with weak texture and slope. Our disparity optimization method solves this problem and achieve a smooth disparity. First, the initial disparity image is obtained by a local stereo matching algorithm using segment tree. Then, the guided filter is improved by using gradient domain information. Lastly, the improved guided filter is adopted as the disparity optimization method to smooth the disparity image. Experiments conducted on the Middlebury data sets demonstrate that by using the proposed algorithm in this paper, the smoothness of the disparity map in slope regions is improved, and a higher precision of dense disparity is obtained.
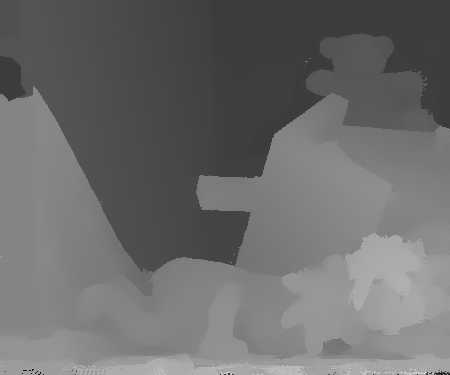
Disparity result on dataset teddy
- [1] D. Scharstein and R. Szeliski, “A taxonomy and evaluation of dense two-frame stereo correspondence algorithms,” Int. J. of Computer Vision, Vol.47, No.1-3, pp. 7-42, 2002.
- [2] L. Di Stefano, M. Marchionni, and S. Mattoccia, “A fast area-based stereo matching algorithm,” Image and Vision Computing, Vol.22, No.12, pp. 983-1005, 2004.
- [3] X. Mei, X. Sun, W. Dong et al., “Segment-tree based cost aggregation for stereo matching,” Proc. of the IEEE Conf. on Computer Vision and Pattern Recognition, pp. 313-320, 2013.
- [4] J. Zhou, Y. Xu, and W. R. Yu, “Phase matching with multiresolution wavelet transform,” Three-Dimensional Image Capture and Applications V, SPIE Proc., Vol.4661, 2002.
- [5] J. Ko and Y.-S. Ho, “Stereo matching using census transform of adaptive window sizes with gradient images,” 2016 Asia-Pacific Signal and Information Processing Association Annual Summit and Conf. (APSIPA), pp. 1-4, 2016.
- [6] Q. Yang, R. Yang, J. Davis et al., “Spatial-depth super resolution for range images,” 2007 IEEE Conf. on Computer Vision and Pattern Recognition (CVPR’07), pp. 1-8, 2007.
- [7] M. Bleyer, C. Rother, and P. Kohli, “Surface stereo with soft segmentation,” 2010 IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), pp. 1570-1577, 2010.
- [8] Y. Zhang, M. Gong, and Y. H. Yang, “Local stereo matching with 3D adaptive cost aggregation for slanted surface modeling and sub-pixel accuracy,” 2008 19th Int. Conf. on Pattern Recognition (ICPR), pp. 1-4, 2008.
- [9] K. He, J. Sun, and X. Tang, “Guided image filtering,” European Conf. on Computer Vision (ECCV 2010), pp. 1-14, 2010.
- [10] F. Kou, W. Chen, C. Wen et al., “Gradient Domain Guided Image Filtering,” IEEE Trans. on Image Processing, Vol.24, No.11, pp. 4528-4539, 2015.
- [11] Z. Li, J. Zheng, Z. Zhu et al., “Weighted guided image filtering,” IEEE Trans. on Image Processing, Vol.24, No.1, pp. 120-129, 2015.
- [12] P. Long and H. X. Lu, “Weighted guided image filtering algorithm using Laplacian-of-Gaussian edge detector,” J. of Computer Applications, Vol.35, No.9, pp. 2661-2665, 2015.
- [13] H. Hirschmuller and D. Scharstein, “Evaluation of cost functions for stereo matching,” 2007 IEEE Conf. on Computer Vision and Pattern Recognition (CVPR’07), pp. 1-8, 2007.
- [14] X. Mei, X. Sun, M. Zhou et al., “On building an accurate stereo matching system on graphics hardware,” 2011 IEEE Int. Conf. on Computer Vision Workshops (ICCV Workshops), pp. 467-474, 2011.
- [15] K. J. Yoon and I. S. Kweon, “Adaptive support-weight approach for correspondence search,” IEEE Trans. on Pattern Analysis and Machine Intelligence, Vol.28, No.4, pp. 650-656, 2006.
- [16] S. B. Pollard, J. E. Mayhew, and J. P. Frisby, “PMF: a stereo correspondence algorithm using a disparity gradient limit,” Perception, Vol.14, No.4, pp. 449-470, 1985.
- [17] Q. Yang, “A non-local cost aggregation method for stereo matching,” 2012 IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), pp. 1402-1409, 2012.
- [18] C. Tomasi and R. Manduchi, “Bilateral filtering for gray and color images,” 6th Int. Conf. on Computer Vision, pp. 839-846, 1998.
- [19] A. Hosni, M. Bleyer, C. Rhemann et al., “Real-time local stereo matching using guided image filtering,” 2011 IEEE Int. Conf. on Multimedia and Expo (ICME), pp. 1-6, 2011.
- [20] S. Zhu and L. Yan, “Local stereo matching algorithm with efficient matching cost and adaptive guided image filter,” The Visual Computer, Vol.33, No.9, pp. 1087-1102, 2016.
- [21] S. Li, X. Kang, and J. Hu, “Image fusion with guided filtering,” IEEE Trans. on Image Processing, Vol.22, No.7, pp. 2864-2875, 2013.
- [22] D. Scharstein and R. Szeliski, “High-accuracy stereo depth maps using structured light,” 2003 IEEE Computer Society Conf. on Computer Vision and Pattern Recognition, Vol.1, p. I, 2003.
- [23] D. Scharstein and C. Pal, “Learning conditional random fields for stereo,” 2007 IEEE Conf. on Computer Vision and Pattern Recognition (CVPR’07), pp. 1-8, 2007.
- [24] D. Scharstein and R. Szeliski, “Middlebury Stereo Evaluation – datasets,” http://vision.middlebury.edu/stereo/data/ [accessed April 20, 2018]
This article is published under a Creative Commons Attribution-NoDerivatives 4.0 Internationa License.